
半導体や精密機器等の工場にはクリーンルームがある。そこでは気中微粒子濃度の測定を行う。人間からは微粒子が発生するため多人数での測定が不可で、少人数で行っても清浄度に影響を与えてしまうため、自律走行ロボット(AMR)を用いた測定が望まれる。
自律走行方式としてLiDAR(光検出&測距)センサとSLAM(自己位置推定&マッピング同時実行)を組み合わせたシステムが主流だが、クリーンルームにはステンレスなどの鏡面が室内に存在し、レーザーによる測距が誤作動するために使用できず、磁気テープ及びカラーテープを床面に貼って誘導する自律走行方式も床を汚染するために使用できないという。
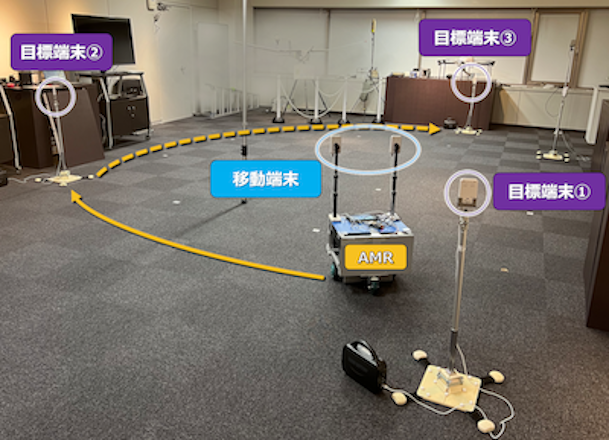
NICTとテクノ菱和は、高精度な距離計測が可能なインパルス型超広帯域無線(IR-UWB)を用いてAMRを簡便に自律走行させるシステムの開発に成功した。同システムは、対象エリアの地図作成と座標標定の事前作業不要で、複数地点に置かれたポータブルなIR-UWB端末(目標端末)と、AMRに載せたIR-UWB端末(移動端末)との間でリアルタイムに距離計測を行い、AMRを連続自動走行させる。
「2台の移動端末と、目標端末との距離計測結果に基づいて目標地点までの距離と方向角を推定するアルゴリズムを用いた目標地点推定部」と「AMRの走行速度・加速度及び回転角速度・角加速度を考慮する駆動制御アルゴリズムを用いたAMR駆動制御部」の連携で成立する。両部間で常時制御データ等を通信して、AMRは方向角を更新しながら走行する。
今回の技術が実用化されれば、クリーンルーム等における環境計測作業の省力化と作業時間帯柔軟性がもたらされる。低発塵環境での清浄度測定が可能になる。計測、物流、建築分野などにおいてAMRの自律作業支援への応用も期待される。上記システムは、「NICTオープンハウス2025」で披露される予定だ。