
人手不足等を背景に、物流・製造現場でロボットの導入が進んでいる。規定動作を自動かつ無停止で行うロボットに加え、近年、カメラにて対象物を検出することで、現場に即した動作の行えるロボットのニーズが非常に高まっている。
ただし動く対象物を検出してロボットの動作に反映するには、画像検出からフィードバックまでを超低遅延で行える必要があり、照明環境や膨大なAI学習など、上記検出・反映に付随した様々な課題があるという。パナソニックコネクトは、現場で動く対象物を光沢などのノイズがあっても高精度かつ1ミリ秒以下でカメラで検出することで、物流や製造現場のロボットによる作業を止めずに高効率化するセンシング技術(紹介動画:YouTube)を開発した。
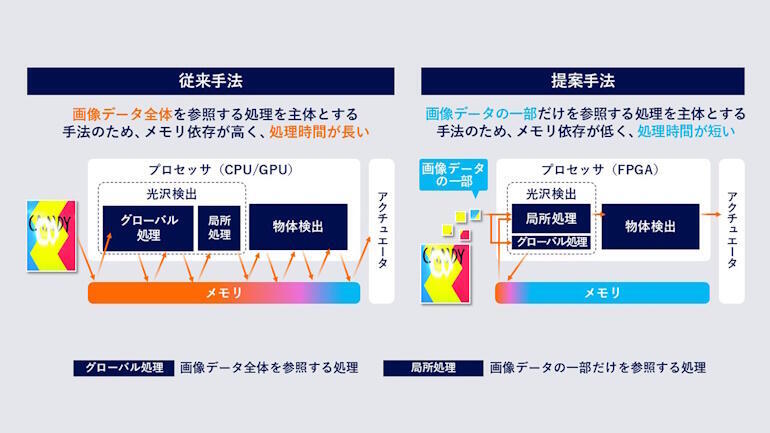
対象物画像データの保存から処理、処理済みデータの保存かつアクチュエータへの送信といったメモリ高依存型の逐次プロセスにおいて、全体で数百ミリ秒~数十秒の遅延が発生する。そこで同社はFPGA(フィールドプログラマブルゲートアレイ)を活用して、カメラから転送されるピクセル単位の画像データの転送速度に同期し、画像データの一部を使用して光沢検出する特殊なアルゴリズムを適用した。
それにより、順次転送されてきた画像データを即時画像処理するため、データ保存用メモリが不要となり、低遅延で高速なロボット制御を可能となる。当該技術は、毎秒1,000枚の画像(1,000fps)を撮影する高速カメラで実現したことにより、全処理が1ミリ秒以下で行える、画期的な性能を達成した。
動くモノを精確に検出しロボットにフィードバックできる。同社が事業領域として注力しているサプライチェーンの領域、製造、物流、流通のあらゆる現場において自動化の効率向上に貢献できる。ノイズがあっても動く対象物を1ミリ秒以下で精度高くセンシングできる同技術(特許出願中)は、国際学会ICIP2024で論文が採択された。