
ロボット/AI
新開発の運動生成手法で歩く走る、ロボットが人間らの動きを真似
深層強化学習や模倣学習を用いたロボット制御の応用研究が近ごろ活発である。前者を用いれば環境適応可能な運動が生成できる、しかし広大な入力空間の探索に膨大な計算コストを要する。また後者では、学習した運動に近い範囲に環境適応性が制限されるといった問題が知られているという。
東北大学大学院工学研究科(Neuro-Robotics Lab)とスイス連邦工科大学ローザンヌ校(EPFL)の研究グループは、深層強化学習と模倣学習双方の利点を生かせる新しい運動生成の手法(AI-CPG;適応模倣型中枢パターン生成器)の開発に成功した。CPG×模倣学習にて運動速度の修正が容易で人間等の運動模倣に基づく自然な運動生成ができる。同手法は膨大な探索処理を回避でき、未知の環境にアダプティブ可能だ。
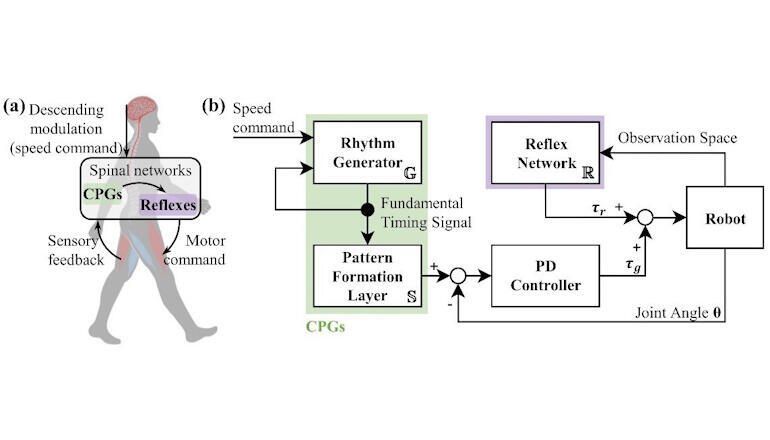
人間の運動が感覚情報を用いた反射ネットワークによりCPGと連動して環境適応する構造を踏襲し、CPG・運動ニューロン層間に同ネットワークを設け、深層強化学習を適用することで上記アダプティブ機能を実装した。これにより、歩行と走行の再現に加え、データがない運動周波数の運動生成を行うこと、歩行から走行まで連続的に運動を変化させること、学習時と異なる床面の状態への適応性も実現できることが確認できた(動画:YouTube)。
AI-CPG法は模倣学習自体が生体に潜む冗長性の低減につながっている。ただ原理的に自由度は拘束せず、冗長性自体は維持しながら学習時の探索計算スペースのみを縮小し、未知の環境への深層強化学習の探索処理を模倣学習と同時に行うことで簡略化。そのうえCPGにより運動速度は自由に調整可能である。
生体がもつ特徴を反映した新しい運動生成の手法であり、冗長性問題の解決に向けての一歩になることが期待されるという。研究成果は、国際学術誌IEEE Robotics and Automation Lettersに掲載された。