
実際に歩行してVR空間内を探索する、それは高い没入感をもたらすとして、幅広い分野での応用が期待されている。「ルームスケールVR」はしかし、大きな物理空間を必要とすることと、触覚のフィードバックが得られないことが大きな障壁になっていたという。
東北大学電気通信研究所、チャルマース工科大学、ベルゲン大学の研究グループは、VR空間内でドアを開ける際のリダイレクション(錯視方法)と触覚フィードバック提示により上記障壁を打ち破るシステム「RedirectedDoors+」(解説動画:YouTube)を開発した。同システムは一昨年発表した仕組みを大幅に拡張し、複数ドアを連続的に開けながらVR空間内を歩行する体験での触覚フィードバックを提示するとともに――
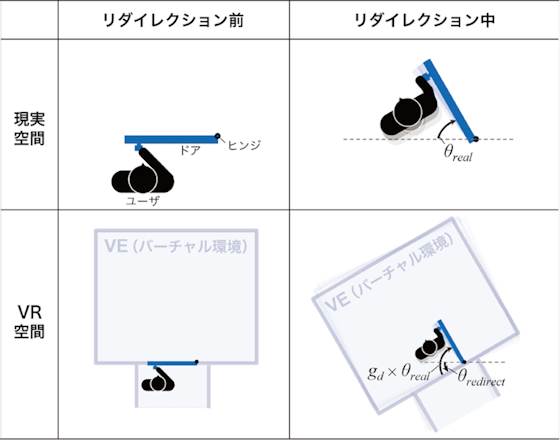
その体験が限られた物理空間内に収まるようにユーザの進行方向をだまして誘導することを実現したもの。ドアノブの触覚フィードバックを提示するために、全方位自走式ロボットにドアノブ型装置を搭載した「ドアロボット」を開発。さらにそのロボット複数台の配置を適応的に決定するための「ロボット配置アルゴリズム」と、上記誘導をする「ユーザステアリングアルゴリズム」を新開発した。
性能評価試験では、形状の異なる6種類のVR環境において、歩行体験に必要な物理空間サイズを平均74%まで圧縮できることを示した。同システムを用いた歩行を12人に体験してもらい、実環境で安全に動作することも示した。よりリアルなVR体験を限られた物理スペースで実現できる技術は多様な分野へ応用可能であると期待される。
今後はそれらの応用シナリオでの実証を目指す。ユーザが自在に歩行する場合にも対応可能とする。汎用的なリダイレクションシステムの実現も目標にしていくという。JSPS科研費の支援を受けて実施された研究の成果はIEEE Xploreに掲載された。IEEE VR 2024で口頭発表もされる。