
「前へならえ」をするとき、自ずと体幹を後ろ側に反らす。私たち人間は、中枢神経系が、身体の力学的運動に関する内部予測モデルを構築していて、身体部位の加速や減速に伴う慣性力の予測とそれを相殺する運動を認識している。環境適応的な姿勢制御を行うAI/神経回路網を構築するには――
学習機能によって運動制御の適応性を向上させる必要がある。近ごろ生成AIは発展めざましい。が、生体の自己組織的な振る舞いを生成することは難しい。一つないし少数の正解を導出するAIにとって、身体に潜んでいる冗長性――同じ種類の運動タスクの実現に無数の解が存在することは問題だ。どの制御モードが適しているかを、運動タスクや環境の力学条件に応じて自己組織的あるいは連続的に、AIに生成させるのは容易ではないという。
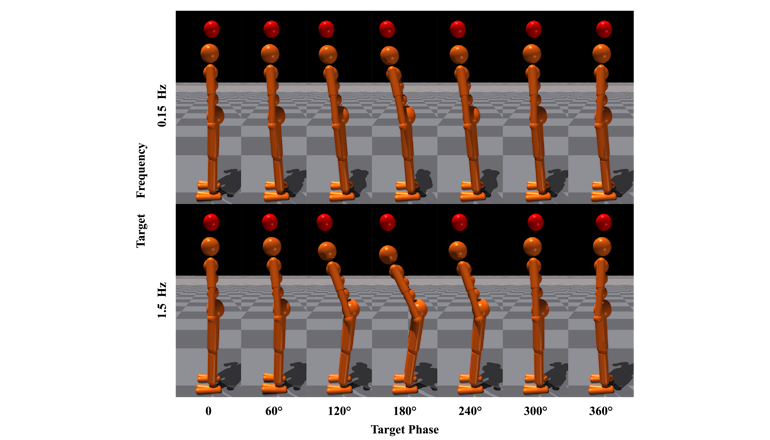
東北大学大学院工学研究科の研究グループは、身体力学モデルを想定することなく、運動周波数に着目することで力学条件に応じて運動モードを適応的に調整できるニューラルネットワークの構築に成功した(関連動画:YouTube)。同ネットワークでは、人間の身体運動を司る姿勢制御モードの自動切替え機構を環境に応じて自己組織的に実行できる。
身体力学情報の事前準備が不要で、運動経験と強化学習のみにて自己組織化現象(系全体を俯瞰できない各個の自律的な振る舞いにより秩序を持つ大きな構造を作り出す)が再現可能である。学習したニューラルネットワークは、連続的なタスク変化および未学習範囲の身体条件にも適応できることを実証した。
過去の関連研究で、人間の計測データを使わずに深層強化学習により、自然なリーチング運動パターンを生成できることを示した。今回の学習フレームワークはそれとも共通性があるので、生物的な振る舞いを示すAIの開発につながる知見になるという。研究グループの成果は英ネイチャー系の『Scientific Reports』に掲載された。