
機械学習はAI技術のひとつである。従来、AIベースのロボットでは、多様な作業をさせるために大規模データを使って最適な予測モデルを構築する方式が主に用いられてきた。が、ロボットは実環境で想定外の事象に遭遇する。事前に全状況に対応できる予測モデルを構築することは困難だったという。
早稲田大学理工学術院(尾形哲也教授)と日立製作所の研究グループは、ロボットの過去の学習内容と現実との差を認識し、次の行動をリアルタイムに決定・実行可能な"深層予測学習型"のロボット制御技術を新たに開発した。
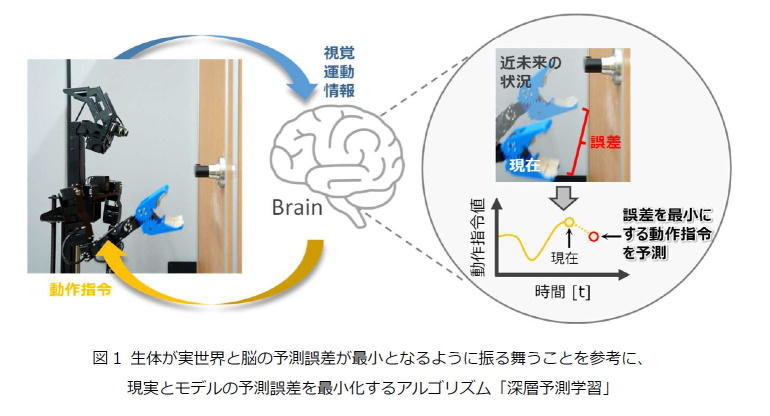
同技術は、生体の脳の働きを解釈可能な自由エネルギー原理――環境に対する予測可能性を上げるという原理によって、認識だけでなく行動も生成されるとする仮説に従った脳の理論――を参考に、過去の学習内容と現実の差が最小になるように次の動作を決定・実行可能な計算アルゴリズムを考案して得たもので、未学習の作業内容や環境においても、ロボットが次の作業を柔軟に実行することができる。
脳機能を参考とする深層予測学習技術に加えて、深層予測学習を用いた動作生成技術、複数予測モデルのリアルタイム切替技術を備えた。新開発した「ロボット制御技術」によって、ロボットは、急な作業内容や環境の変化にも柔軟に対応できる。たとえば人間なら簡単だがロボには難しい"ドア開け通過動作"について、複数回の教示だけで未学習のドア模様、ノブ位置・形状をも適切に処理し、自律的かつ円滑に複合動作ができること等を確認した。
今後、状況が変わりやすくロボットの導入が困難であった作業現場に上記制御技術の適用を図ることにより、ロボットの適用範囲を拡大し、社会の労働力不足の解決をめざすという。同グループの研究成果は、2021年7月時点のインパクトファクタがロボット工学分野で最高峰(IF=23.748)を誇る国際学術誌「Science Robotics」に掲載された。
自由エネルギー原理: 環境に対する予測可能性を上げるという原理によって、認識だけでなく行動も生成されるとする仮説に従った脳の理論