
31万人超の視覚障碍者が生活している。日本では、高齢化の進展とともにその数がさらに増えると予想される。視覚障碍をもつ人たちは日々の生活において、様々な場面で不自由を強いられ、単独で行動する際には晴眼者のそれと異なる危険にさらされる。
周りの状態を確認することが困難なため、公共交通機関を使った移動や音響式信号機のない横断歩道における歩行などで、視覚障碍をもたない人が体験しないような事とリスクを感じる。新型コロナウイルス禍にある昨今は特に、ソーシャルディスタンスの確保が求められ、接触することや助けてもらうことが以前よりも難しく、非常に生活しづらくなっている。そんな状況下でも危険無く、必要または機会に応じて視覚障碍者が出歩けるようにしたいという。
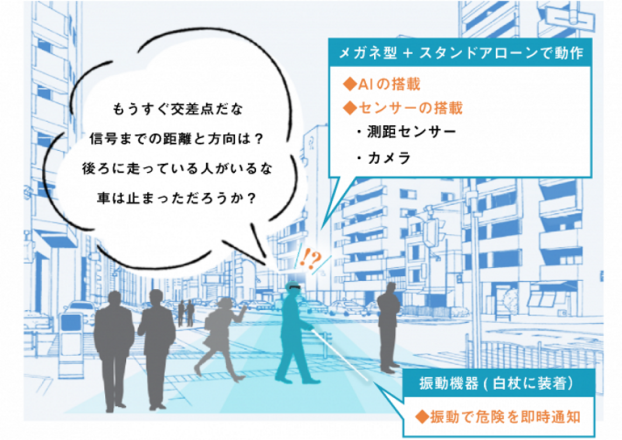
福祉機器開発を行っているマリス、九州工業大学の和田親宗研究室およびマクニカのAI専門家組織ARIHは、マリスと九州工大が今年3月より実証実験を進めてきた視覚障碍者のための歩行アシスト機器「seeker」において、画像認識AIを活用した危険検知の精度・性能向上に産学連携で共創し、製品化を加速する。24年3月のseeker実用化に向け、ユーザーに寄り添った最適な技術の調査・検証を来年3月までに実施する。
①上記実証実験(駅ホームや横断歩道、街なか段差等の危険検知)における実用化に向けた課題の洗い出し、②視覚障碍をもつ人の実体験に沿ったデータの取得、③マクニカ保有のAIライブラリを活用した検証を行う。これらにより、スタンドアローンでリアルタイムに危険察知ができる「seeker」の実用化を最短期間で実現し、視覚障碍者が日々安全に暮らせる社会を目指す。
3者は今回取得したデータを蓄積・活用し、障碍者や高齢者が社会に溶け込めるような福祉支援をAIで加速、ウェルビーイングの向上に努めていく。すべての人が住み善い社会の実現を目標にしていく考えだ。