
コロナ禍でその需要が増加している。製造・物流現場での搬送、公共施設内の清掃・警備・搬送など、様々な用途での活用が進んでいる、自律移動ロボットの市場は国内外で二桁成長が見込まれている。
製造・物流現場では、同一メーカー単一機種の移動ロボットを複数台用い、全体の運行を上位システムで管理する形態が一般的である。一方、公共施設内では、用途ごとに異なるメーカーの移動ロボットが稼働する場合が多くなり、個別システム配下で異種のロボットは位置情報等を共有できず、立ち往生したり、複数が狭い場所で動けなくなったりすることが起こりうる。
そこで、NEDOとともに、メーカーや種類が異なる複数のロボットの運用を共通システムで可能とする移動ロボットインターフェースを策定し、サンプルソフトウェアを公開(20年3月記事)するなど、RRIのロボットイノベーションWG等の活動を通じて、同インターフェースの標準化を進めている――が、共通の運行システム経由で情報共有ができても、通信は遅延・中断する可能性がある。
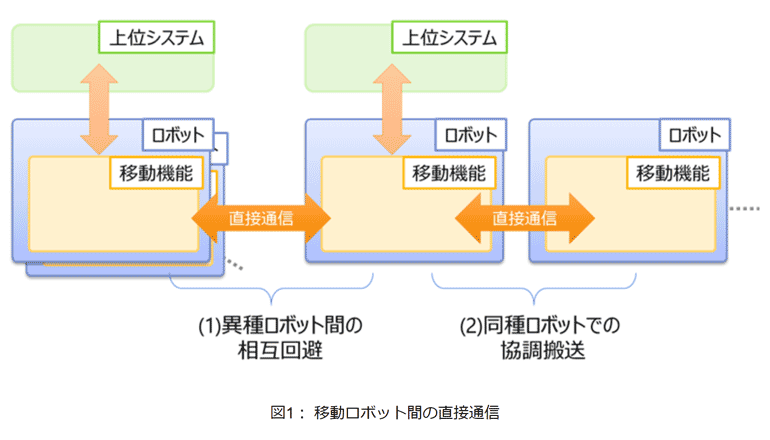
移動ロボットにおいても人間のように、運行システムを介さず互いを認識し、臨機応変に連携する技術が求められているという。東芝は、複数の移動ロボットを直接通信でつなげることにより迅速な相互回避や協調搬送を可能にする協調連携システムを開発した。同システムは、「運行システムが異なる移動ロボット同士の相互回避」「複数の同種ロボットでの協調搬送」を特徴とする。
通路内での相互回避を実現し、さまざまな自律移動ロボットの導入促進に貢献する。直接通信により低遅延通信を達成するので、複数の同種小型移動ロボットによる大きな荷物の協調搬送も可能になるという。同社は、深川江戸資料館にて芝浦工業大学(松日楽研究室)のロボット連携実験の一つとして、上記相互回避の連携実証を行った。今般の技術の詳細は2021IEICEソサイエティ大会で発表された。