
ICT(情報通信技術)の全面的な活用による建設現場の生産性と魅力の向上、働き方改革への取り組みが進められている。建設業では、ICT施工に加え、生産プロセスそのものの変革が重要であり、建設重機の自動化や遠隔操縦、自律化に大きな期待が寄せられている。
特にバックホウは、地盤の造成やトンネル掘削といった土木工事、大規模建築物の地下掘削における土砂の積み込みなど、施工における膨大な作業に用いるため、その自律化による効果が非常に高いものだという。大林組、NEC、大裕は、一昨年に共同開発した「バックホウ自律運転システム」について、トンネル工事現場にて土砂の積み込み搬出に適用する実証実験を行ったことを今月13日に発表した。
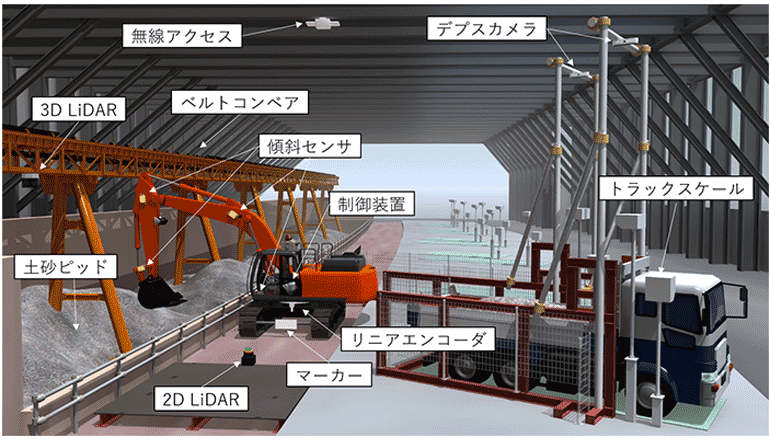
3社は、センシング技術とそれらを統合管理する「ネットワークドコントロールシステム」、NECの「適応予測制御技術」、大林組と大裕の共同開発による汎用遠隔操縦装置「サロゲート」を活用した上記システムを19年7月に発表していて、今般、機能を拡張のうえ、大林組のトンネル施工現場で、複数台の異なるメーカのバックホウが、土砂ピット内に堆積した土砂を掘削しダンプトラックに積み込む一連の作業を、自律運転にて実施した。
自律運転中は遠隔地から1人のオペレータが監視し、いつでも遠隔操縦に切り替えられる体制を整備することで、バックホウに搭乗するオペレータの省人化を実現した。バックホウ自律運転システムは、搬出時の総重量を目標値の98~100%の精度で積載する「効率の良い掘削・積み込み作業により、人手と同等の作業を実現」し、あらゆる形状のダンプトラックに適応できる。
実用性と機能性が評価され、国際学会CASE 2021に採択されたという。3社は今後、施工現場への実適用はもとより、台数を増加させることによるさらなる生産性向上や、屋外環境への対応、他の建設重機との連携といった技術の拡張に取り組む予定だ。