
新型コロナウイルス感染症(COVID-19)は変異株の出現などもあり、流行の収束時期については未だ予断を許さない。現在、重症患者をみる集中治療室では、感染防止のため、医療従事者は機器を操作するだけでもガウンやマスクなど、入室前から防護装備を万全にしておくことが求められる。
例えば、点滴静脈注射による薬液投与の流量速度を機械的に調整するシリンジポンプの場合、簡易なボタン操作が多く、その度に防護服などを装着し、入室する必要がある。防護服の着脱不備による感染リスクや、防護服の使い捨てによるコスト増大が課題になっていたという。大成建設と国立国際医療研究センター(NCGM)は、医療従事者の労働環境を改善する「集中治療室向け医療機器遠隔操作ロボット」を開発した。
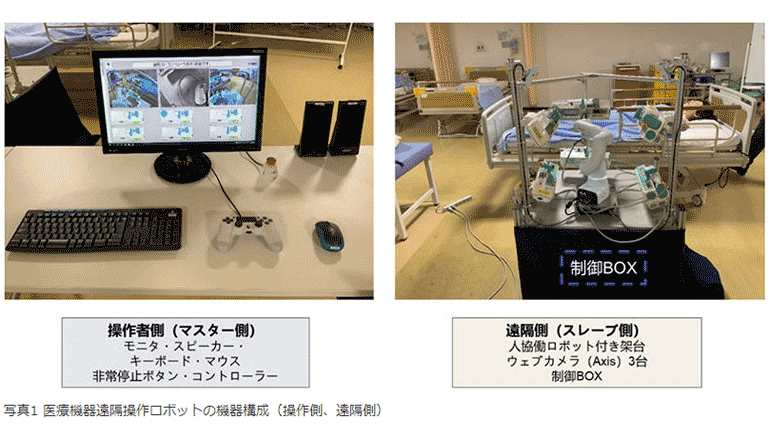
大成建設の「力触覚伝達型遠隔操作システム」技術を応用し、医療従事者が非接触エリアから医療機器を操作できるロボットを開発。その第一弾として、最も頻繁に操作が必要な医療機器、シリンジポンプを遠隔操作する実験及び効果の検証を行った(紹介動画YouTube)。NCGMセンター病院において、同ロボットの操作状況や性能を検証した結果、医療従事者の感染リスクを低減したという。
ティーチングによるアーム移動の「自動化と遠隔操作のハイブリッド動作を実現」、制御機構を搭載した専用架台を用いて「ロボット1台でシリンジポンプ複数台を操作可能」、安全性を担保かつアーム先端の治具のみで調整ダイヤルを回す「シリンジポンプのマルチタスク操作に対応可能」といった特長を実現した。
両者は、今回の人協働ロボットによる医療機器遠隔操作を足がかりに、すでにある「力触覚伝達型遠隔操作システム」などを使い、医療現場における活用の可能性についてさらなる検証を進める。医療現場の多様なニーズに対応すべく、医療従事者の業務支援に役立つ多目的ロボットの開発を目指していく構えだ。