
自動運転時代が来る。模範的運転モデルの構築には運行設計領域(ODD)の定義と、ODDにおけるシステム動作を定義した無数のシナリオ等への対応が難題となっている。今日、自動車運転教習所では人材不足による新規免許取得者や高齢者講習の長期予約待ちが問題になっているという。
東京大学、名古屋大学、JSTは14日、CRESTの課題「完全自動運転における危険と異常の予測」を進める研究グループが、自動車教習指導員の運転行動をルール化した運転モデルを開発したと発表。自動運転技術を用いてリアルタイムに得られる位置推定・障害物検知結果を評価指標とし、同モデルを使い、ドライバーの運転行動の定量評価とそれに基づく危険予測を可能にしたとする。
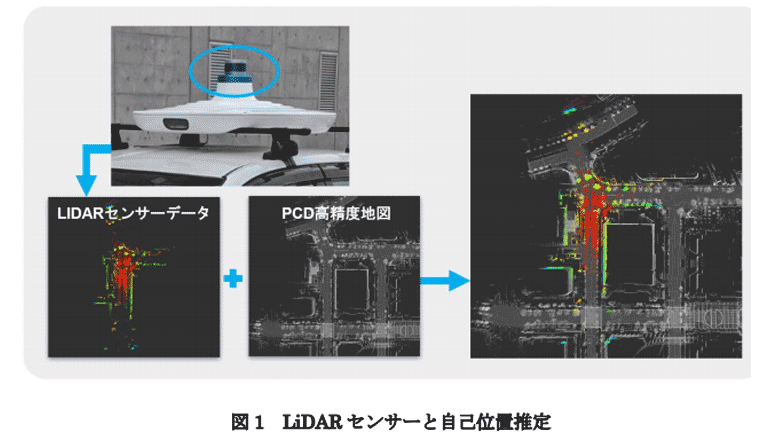
研究グループは、ODDを自動車教習の範囲に限定、かつ教習指導項目のみを評価指標とすることで、特定のユースケースとシナリオに基づいた運転モデルの開発に成功した。LiDAR(光検出&測距)の観測データとPCD高精度地図を照合させることで位置推定や障害物検知を行うオープンソースの自動運転ソフトウェアAutowareを導入し、センチメートル級の推定・検知精度を達成した。
車内カメラで取得した画像から機械学習モデルを用いてドライバーの顔向き推定することを可能とした。これらの演算処理結果を指標とし、上記運転モデルを用いて評定することで、右左折前の車両の寄せ方や目視による確認、ショートカット、大回りなどの運転行動を教習指導員と同等の精度で審判するルールベースの評価手法を構築――。異常判定をドライバーにフィードバックし、ブレーキを自動制御する機能も開発した。
上記評価手法と危険回避手法をシステムにしてTierIVとミナミHDで製品化した。AI教習システムについて、これを教習所に適用することは指導員の業務負荷軽減のみならず、新規免許取得者や高齢運転者の受け入れ拡大につながるだろうという。