
東日本大震災の発生から10年が経つ。いま、防災・減災分野における新たなテクノロジー活用の期待が高まっている。そのなかでも特に、小型無人航空機ドローンは、「空飛ぶカメラ」として迅速な情報収集と意思決定に役立てられるため、全国の消防本部や自治体への配備が進捗しつつある。
災害発生直後の現場上空には、ヘリコプターをはじめとする複数の有人機が飛び交う状況となる。そこに複数のドローンが加わることとなる。今後、「空飛ぶカメラ」ドローンを安全かつ効率的に利活用するには、有人機とドローン、ドローンとドローンの衝突回避を含めた技術面・制度面での飛行環境整備が必要不可欠になるという。
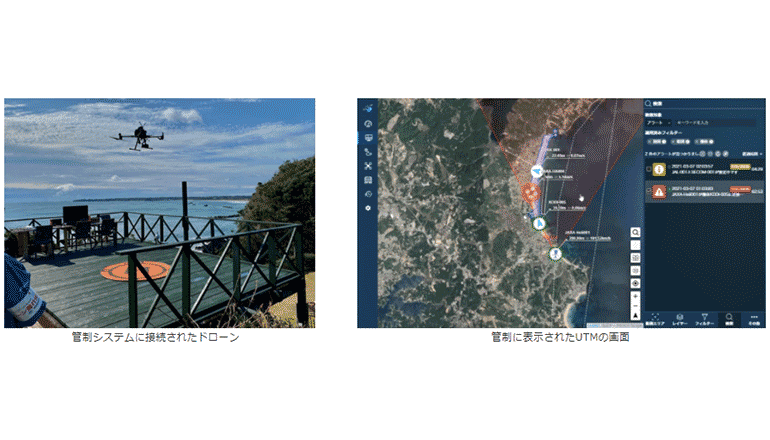
国際航業は今年3月6日・7日、KDDIおよびウェザーニューズらとともに、三重県志摩市の国府白浜海岸において、南海トラフ地震への対応を想定したシナリオで複数のドローンMATRICE300(DJI社製)を運航管理システム/UTMに接続した実証実験を行い、目的とするデータ収集やドローン完全自動航行の実現に向けた運航管理システムの機能検証に成功した。
上記シナリオに基づく飛行計画を「KDDIスマートドローン」管制システムにつないだうえで、実機の運航および計測作業を実施。取得データの画像解析に国際航業のクラウドサービス「KKC-3D」を活用し、3次元モデルを構築した。今回さらに、有人機の飛来も想定して、ウェザーニューズの小型動態監視システム「FOSTER-CoPilot」による仮想ヘリ位置、JAXAのUTMシミュレータによる仮想ドローンの運航情報を同システムと共有して、より複雑な状況とした。
KDDIとパーソルPTが受託したNEDO事業の一環である上記実証実験によるドローン運航管理システムについて、技術的な課題や運用面の課題を洗い出し、その改善や検証を通じて、災害時におけるドローンの完全自動航行に向けた環境整備を進めていく考えだ。