
ニューヨーク国連本部にて15年9月「国連持続可能な開発サミット」が開催され、150を超える加盟国首脳の参加のもと、その成果文書として「我々の世界を変革する:持続可能な開発のための2030アジェンダ」が採択された。
人間、地球および繁栄のための行動計画として宣言された同アジェンダは、17のゴールと169のターゲットからなる「持続可能な開発目標(SDGs)」である。日本では外務省がそれに関連した取り組みを紹介するプラットフォームを運営しているほか、世界各地でも進展がみられる――が、それを達成するには、取り組みのスピードを速め、規模を拡大しなければならないとして、今年1月に「行動の10年」が開始された。
2020年12月1日、東京大学大学院新領域創成科学研究科、デンソー、日本精工、ブリヂストン、ロームは共同で「SDGsを実現するモビリティ技術のオープンイノベーション」社会連携講座の設置を発表した。同日から24年3月31日まで、SDG7・13について、SDG9を試行しながら、内外智融合させて社会課題を解決する教育研究を行う。この度の講座は同研究科に置かれ、藤本博志准教授を含む2名体制で実施される。
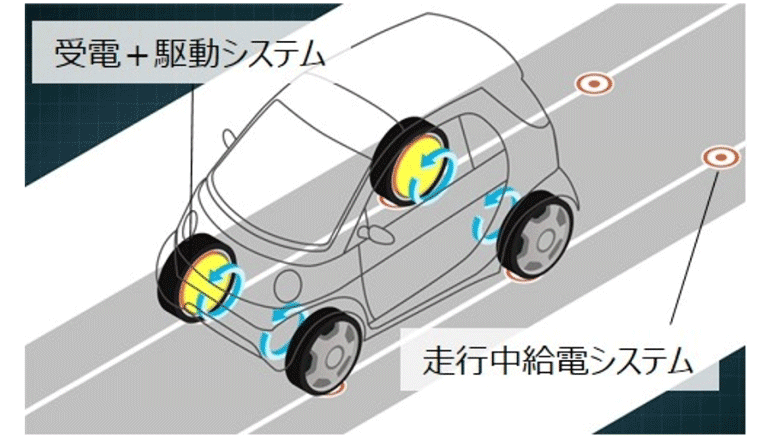
複数の学術領域にわたるモビリティ研究で5者が共同する。JST未来社会創造事業の研究を発展させた走行中給電システムや車両運動制御、それらを組み合わせたシステムの研究を第一のテーマとする。モビリティの電動化を支える技術や電動モビリティを省資源でより持続可能にする技術の研究開発と、研究成果の一部を開放するオープンイノベーションの仕組み構築を実施する。
第3世代走行中ワイヤレス給電インホイールモータを発展させた新たな走行中給電システムの開発をはじめとする、新しいモビリティ技術開発を意欲的に進めていく。同講座が提案するシステムや制御技術の実用化に向け、25年以降の実証実験フェーズを目指すという。