
少子高齢化による人手不足の解消、あるいは生産・サービス効率や各種システムを高度にしていくために、様々な現場でデジタル技術に加えて、ロボティクスの活用が進展している。自動車工場で目にするロボットの手(ロボットグリッパー)が形を変えて、多彩な分野で活躍し始めている。
それは傷みが生じやすい果物や野菜などのピッキングに応用する際、柔らかい「握り」が用いられる。ロボットグリッパーには「把持力」を検出する接触センサーを装備する必要がある。従来、同センサーをつなぐ配線ケーブルがピッキング中に誤って断線――。作業の邪魔にならないよう、それに直接ケーブルを装着した場合、伸縮性のないケーブルが断線することもあったという。
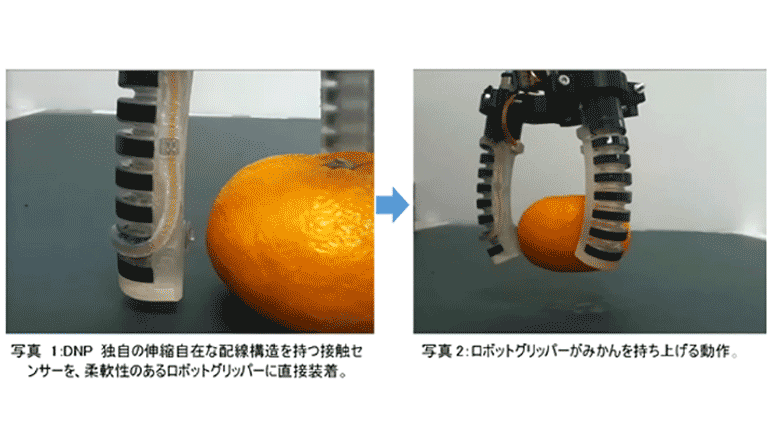
DNPは、ロボットグリッパーの樹脂など柔軟な部分にも直接装着できる、同社独自の伸縮自在な配線構造を持つ「接触センサーユニット」を開発した。これにより、人が行ってきた果物や野菜などのピッキング作業を、柔軟性のあるロボットグリッパーで自動化できるようになる。省人化を実現するという。
縦・横の方向や曲面の形状で収縮する物の動きに対し、自由に追従できる電子回路基板の開発を進めている。同社の「伸縮性ハイブリッド電子実装技術」は柔軟な基材を曲げ伸ばししても抵抗値が変わらない電極配線を可能とする。剛直な部品を電子回路基板上に実装しても伸縮時に断線しにくい工夫を盛り込んでいて、上記ユニットにもこの技術が活かされている。
130%までの伸縮動作を、食品ピッキングに必要とされる100万回程度繰り返しても、電気的・機械的特性が損なわれないことを確認している。新製品は、NEDOのSIP第2期/フィジカル空間デジタルデータ処理基盤の取り組みとして、産総研および立命館大学と連携し、ソフトロボティクス分野における有効性の実証研究として開発されたものであり、「CEATEC 2020 ONLINE」にて披露される。