
諸外国においても昨今、労働力不足の解決手段として、組立業や倉庫業、食品工場など、作業内容が週・日単位で頻繁に変更になる現場でロボット導入の検討が増えている。ロボットに作業をさせるにはふつう、専門家の手を要する。
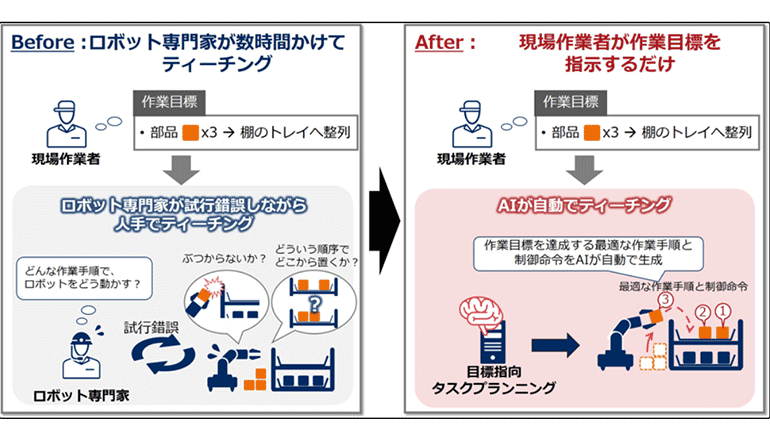
ロボット動作のティーチング――作業目標を達成する手順の設計、および同手順通りに動作させる制御命令の作成・設定が、手動で行われている。物品の整列や箱入れなど複雑な作業では、手順と動かし方を最適化するための試行錯誤が必要で、設定に数時間程度かかる。そのため、作業変更が頻発する現場では、ロボットの導入とか継続的な活用が困難だったという。
NECは、ティーチング作業を自動化するAI技術「目標指向タスクプランニング」を開発した。同技術により、ロボット利用現場の担当者が作業目標を指示するだけで、それを達成する動作をロボットに自動実行させられる。例えば、「複数の部品を棚上のトレイに仕分ける」目標を指示すれば、ばらばらに置かれた複数の部品を適切な順序でピックアップし、棚にぶつからずにトレイに運ぶよう、作業手順とロボットの動かし方を自動で最適化する。
作業変更が頻発し作業環境が変化しやすい現場でもロボット導入・活用が容易になるという。今回の技術によるティーチングプロセスの自動化によって、ユーザーは「ロボット稼働までの時間を大幅に短縮」:入荷部品の棚入れ作業用設定なら専門家の2~3時間vs.数分程度、「設定外の事象に自動で対応」:ロボット用に特別に整備された環境の準備不要といった効果が得られる。
目標指向タスクプランニングの一部は東工大 山北研究室との共同研究の成果で、10月開催予定の国際会議「IROS2020」で発表。オリックス・レンテックの常設ロボットショールーム「Tokyo Robot Lab.」に、9月初旬から上記AI技術を適用したピック&プレイス自動化ロボットがデモ展示される。