
多数の関節および筋肉の冗長性問題、多自由度空間問題を容易に解決している。人間の、運動制御はどのような機序で行われているのか不明で、ロシアの生理学者N.A.ベルシュタインの階層的運動制御の考え方に基づいて「運動シナジー」の存在が示唆された。
その後の研究にて人間や生物での利用が確認された「運動シナジー」はしかし、どのような法則に基づき、どのようなメカニズムで生成されているのか――。数理モデルの構築には至っていない。計算論的神経科学では、ある評価関数を最小にするような算法が提案され、実際に最適化計算を行うと人間らしい動きも生成できる。がそれは人間がある指針を最適にするように動いていることの証明にはなっていない。
その数学的最適化計算には環境と身体の数学的モデルが事前に用意されているため、真の意味で未知の物理的環境において、運動学習の方法としての解決策やシナジー生成メカニズムを明らかにする必要がある。これまでは、どのような計算指針でシナジーが生成されるのかについて扱うものがほとんどなかったという。
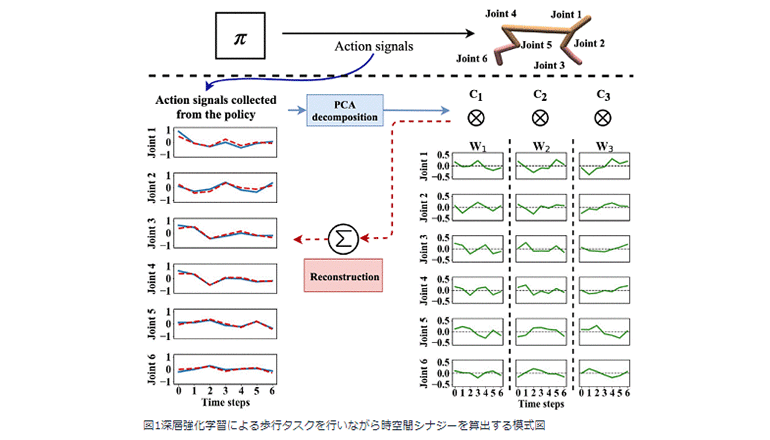
東北大学大学院工学研究科のグループは、深層強化学習による運動学習過程において運動シナジーの発現プロセスが起きていることを初めて定量的に示した。深層強化学習アルゴリズムを用いた報酬では、運動パフォーマンス(歩行速度)とエネルギーを考慮しただけで、シナジーについては何も指定していないにもかかわらず、運動習熟レベルが進むほど運動シナジー強度も増大したという。
運動シナジー発現が特にエネルギーあたりの運動パフォーマンスと高い相関があることも示した。運動学習過程で潜在的に起きている現象との関連性の解明が期待され、人間や生物の運動学習メカニズムの理解への寄与も望めるという。研究グループの成果はICRA2020のジャーナルオプションとして採択され、IEEEロボティクス&オートメーション・レターに掲載された。