
日本は生産年齢人口の減少に直面している。労働力不足や従業員の高齢化が課題となっていて、それらの解決には、人の業務の一部を物理的に代行するサービスロボットの活用が有効だと考えられるが、それにも課題がある。
従来の業務システムはロボットを想定していない。人とのインターフェースを軸に業務プロセスが設計されている。ゆえにロボティクスの活用においては、そのシステムの業務プロセスの中に人とサービスロボットの役割を明確にした設計をすることで、新たな業務サービスが実現できるという。TISと、会津大学は共同で「在庫管理システムと自律移動配送ロボットを連携させた搬送業務の自動化」を目指す。
その実証実験をLICTiA(先端ICTラボ)で実施する。両者が共同研究を進める「自律移動する異機種ロボットに関する要素技術の研究」の成果検証を目的として、前者がFIWAREを活用し開発中のプラットフォーム「RoboticBase」(GitHub)と、後者が研究開発中の自律移動ロボットを連携することで、搬送業務のラストワンマイルの自動化をユースケースとして実施する。
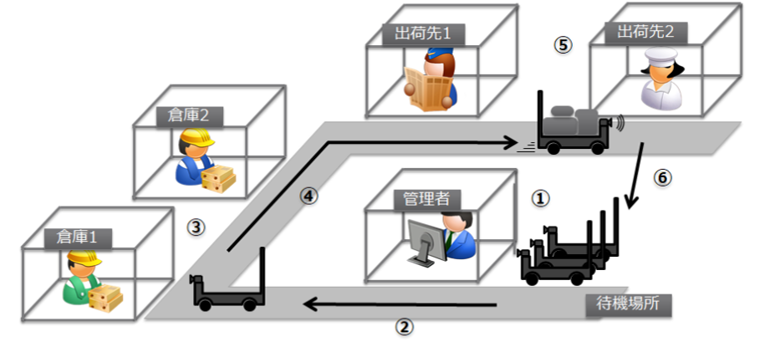
今月26日~29日、RoboticBase及び在庫管理システム(EVENや在庫管理サービス)と自律移動ロボットとのコラボ実験では、①倉庫管理者は同システムで倉庫1から出荷先2へ荷物の引当と出荷指示、②その指示でロボットは待機場所から倉庫1へ移動、③倉庫1担当者はロボット到着時に同システムの指示通り荷物を搭載、④ロボットは搭載完了通知を受けて出荷先2へ移動、⑤出荷先2担当者はロボットから荷物を受取り、⑥ロボットは受取完了通知が来ると待機場所へ帰る。
「RoboticBase」とERPシステムとの連携の容易性、自律移動ロボットの新しい経路計画方式の実現性、「RoboticBase」と自律移動ロボット間のインターフェースにおけるデータモデルが、検証される。