
NICTは、ドローン(小型無人航空機)を含む複数の飛しょう体が飛行する環境での安全運航実現のために、ドローン間の直接通信により、位置情報を共有するシステム「ドローンマッパー」を用いた飛行制御を行い、合計3機までのドローンが互いに接近してくる他のドローンとのニアミスを自律的に回避する実験に成功した。
これまでドローンを目視外で飛行させる場合には、ドローンと操縦者との間の通信を行いながら、あらかじめプログラムされた飛行経路や飛行方法に従って、自動で飛行させる飛行制御が用いられてきた。しかし、これまでの飛行制御方法では、他のドローンや有人航空機等の接近への対応が困難であるという課題があった。
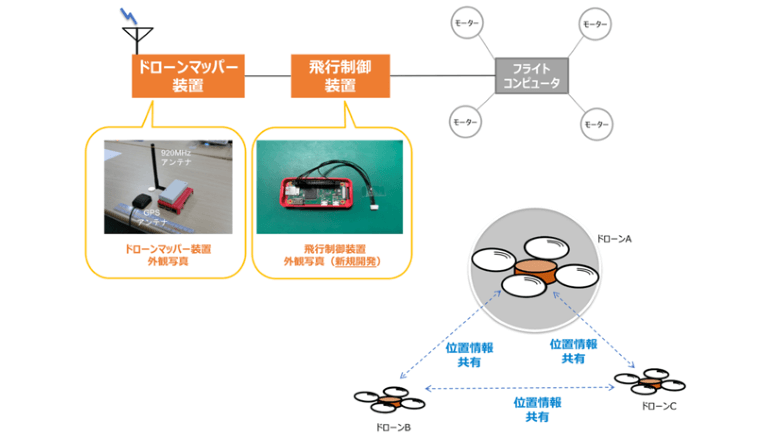
今回開発した技術では、ドローンマッパーとドローンのフライトコンピュータを初めて連携させることで、操縦者を介さずに、ドローン同士が互いに直接共有される位置情報から周辺のドローンの位置を把握。ドローン自体が自動でニアミス回避や群飛行などの飛行制御ができるようになった。
動作を検証するための試験を実施し、最大3機のドローンがそれぞれの目的地に向かう際、自動で接近を検知し、ニアミスを回避した後、予定の飛行経路に戻り、最終目的地まで到達することを確認。今回の開発により、ドローン間の直接通信が、目視外飛行環境におけるドローンの飛行制御と安全運用に寄与できる見通しが得られと説明する。
この研究は、内閣府 総合科学技術・イノベーション会議が主導する革新的研究開発推進プログラム(ImPACT)タフ・ロボティクス・チャレンジ(プログラム・マネージャー: 田所 諭)の一環として行われている。