
日本政府が掲げる「超スマート社会(Society5.0)」では、ロボットや自動運転、人工知能(AI)技術などを活用した産業や医療、暮らしの革新が見込まれている。小型無人航空機(ドローン)もそこに含まれている。
実際Society5.0の政府広報Webサイトには、「それは、いつもの毎日にやってくる、半歩先の未来。」として、ドローンに諸手を差し伸べる少女の姿が描かれている。現在、ドローンの活用に向け、様々な取り組みと法整備が進んでいるが、それらの多くは人間による操縦を前提としている。日本では、少子高齢化による労働人口の減少が続いているため、複数のドローンを用いた大規模な運用は難しい状況にある。
また、実用化が進みつつあるドローンの自動操縦は、事前の最適化計算によって飛行すべき経路を綿密に設計し、その経路上を飛行するものだが――。社会インフラの維持管理や農薬散布、作物の生育状況の監視など、今後ドローンの活用が求められる分野では、鳥が舞い込んでくるなど突発的事態へ臨機応変に対応する必要があるという。
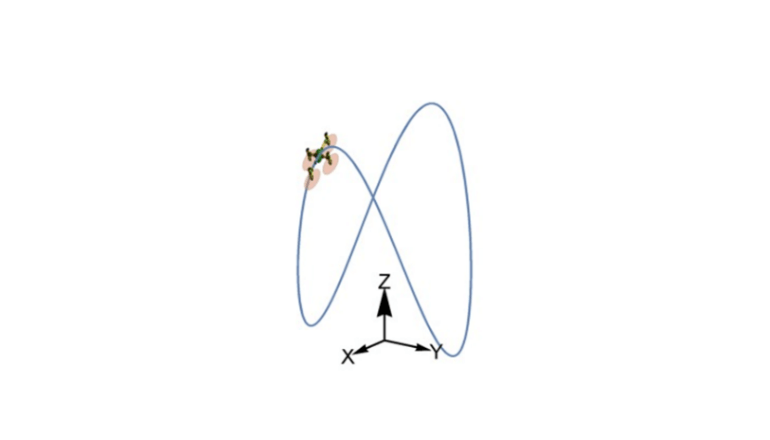
東京都市大学の研究チームは、自律飛行するドローンの運動性能を向上させ、大きな姿勢変化を行っても安全に飛行できる制御システムを実現する、新しいアルゴリズムを開発した。同アルゴリズムにより、自律飛行ドローンの運動性能が向上するだけでなく、突発的な飛来物への対応や、他の自律飛行ドローンと連動しながらドローン群を形成するなどの能力拡張が可能になるという(紹介映像YouTube)。
制御システムにおいて、これまで入力に反映できなかった非線形なドローンの動きを、制御しやすい線形とするために視点(座標)を合わせて変換する。今回のアルゴリズムは5年以内に実機で検証。ドローンの状態や物理的数値を得るしくみの開発後、将来の自動制御による農作物の育成や被災地の現場調査への活用など、不足する労働力の代替も期待される。