
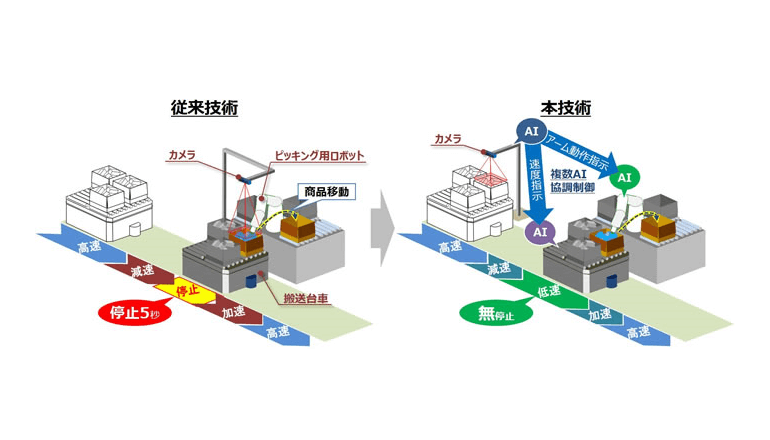
技術は、カメラ画像から、取り出す商品とその最適なピッキング方法を判断するAIのもと、ピッキング用ロボットを制御するAIと、搬送台車を制御するAIをリアルタイムに統合管理し、協調制御するというもの。これにより、商品の荷積み状態に基づいて、搬送台車とロボットアームは最適な速度で互いに衝突することなく近づき、搬送台車の移動を止めることなくスムーズに商品をピッキングすることを可能にするという。
事前にピッキング対象の商品の3Dデータを入力することで、様々な移動速度で運ばれる商品の荷積み状態をランダムに発生させ、ロボットアームによる数万通りのピッキング動作をシミュレーションする。
このシミュレーションの結果に基づき画像解析処理の教師データを自動生成し、ディープラーニングを活用した学習を行うことで、荷積み状態に応じて変化する作業対象の商品位置や搬送台車の速度調整量など、ピッキング用ロボットと搬送台車を制御するために必要な情報を画像から解析し、判断する。日立によると、実際にピッキング作業を行いながら学習する必要がないため、効率的に導入・運用できるという。
また、運ばれてくる商品のケースの中をピッキング用ロボットの手前に設置したカメラで撮影し、画像から最適なピッキング方法を判断するAIのもと、リアルタイムにロボットのAIと搬送台車のAIを協調制御する技術を開発した。
この技術は、ピッキング用ロボットを制御するAIに対しては取り出す商品の位置情報に基づき算出したアーム動作を指示し、搬送台車を制御するAIに対しては現在の移動速度をもとに減速や加速を指示する。
また、ピッキング用ロボットのAIは搬送台車の速度や位置をリアルタイムに確認し、ケースや他の商品に衝突しないようにアーム動作の微修正を行うことで、搬送台車を停止させることなく、効率的な自動ピッキングを実現可能にする。
日立では、搬送台車を都度停止させてからピッキングを行う従来技術と、今回開発した技術の比較実験を行った結果、ピッキング作業の所要時間を38%短縮できることを確認した。
今後、同社はこの技術を搭載した倉庫作業ロボットシステムの製品化を目指す。また、作業の自動化や高速化技術の開発を通じて、物流の効率化に貢献することを目標に掲げる。なお、搬送台車の動きに合わせてロボットアームの動作を計画して微修正する機能は、英エディンバラ大学と共同で開発した。