
クルマはコンピュータである。PCと同様ネットにつながり、スマホのように移動しながら使える。アプリは地図、音楽であったり、同乗者への映像サービスであったり、これからは車自体の基本機能がアプリケーション化する。
コネクティッドカー(つながる車)は、インターネットプロトコル(IP)網経由で常時外部と通信しながら走る、曲がる、止ることを基本にしている。近々実用化されるだろう完全自動運転車も然り。これら交通事故の撲滅などをめざした車両は、クラウドサービス等と連携して安全性を手に入れる。と同時に、汎用IP網につながる危険性をも入手。悪意を持ったサイバー攻撃者に遠隔操作される恐れがある。
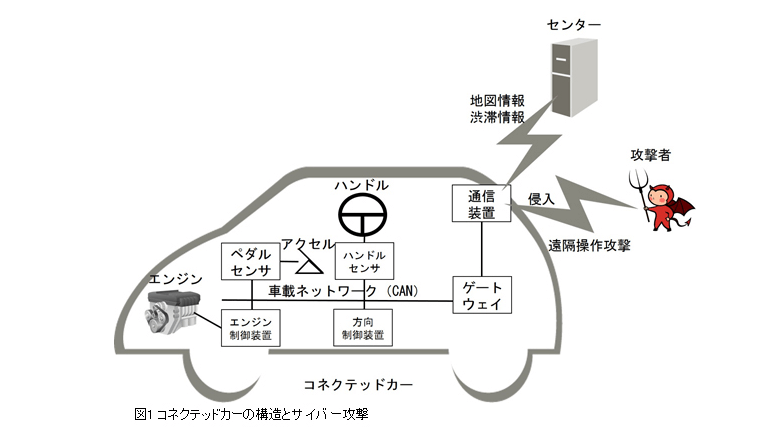
自動車は、車載ネットワーク「CAN」にメッセージを送ることで、ボディや走行の動作を制御する。ここで攻撃者が遠隔操作攻撃を行う場合、外部との通信装置やゲートウェイを乗っ取り、悪意あるCANメッセージを送信する。結果、ドライバーの意図しない急加速や急停止などが引き起こされ、重大事故につながるかもしれないという。富士通研究所は、CANにおけるサイバー攻撃検知技術を開発したことをきょう発表した。
一般的な従来技術では、受信タイミングの揺らぎによって正規メッセージを攻撃と誤検知し、スムーズな走行を妨げる可能性があった。これに対して同社は、CANメッセージが大幅に遅延・早着しても誤検知が少なく、攻撃メッセージを即時検知可能な技術――平常時周期のメッセージ受信数と、実際の受信数とを比較し、ずれの有無を検証。ずれがあった際、そのずれの情報を以降の周期に伝達することで、一時的なものなのか、攻撃によるものなのかを判断する――方式を実現した。
今回の技術は、富士通が提供する「Mobility IoTプラットフォーム」構成要素として'18年度実用化を目指し、今週新潟市で開催のシンポジウム「SCIS2018」にて詳細が明かされる。