
GTC Japan 2017は、文部科学省および理化学研究所後援の下、NVIDIAが主催する日本最大のGPUテクノロジーイベント。GPUテクノロジーの活用がディープラーニングの分野で急速に広がっている背景を受け、同イベントでは、自動運転や医療、VR(仮想現実)など、AI(人工知能)・ディープラーニングの最重要応用領域におけるトレーニングとショーケースが提供される。
ALBERTは、自動運転などに応用可能な深度推定(距離推定)エンジンをNVIDIAの自動運転向けAI車載コンピュータである「DRIVE PX Parker AutoCruise」に搭載し、自社展示ブースで発表する。また、12日にはNVIDIAのInceptionパートナー70社の中からエントリーされた19社が登壇する「INCEPTION AI スタートアップ サミット」に登壇し、深度推定エンジンのプレゼンテーションを行う。13日には「ディープラーニング ビジネス/テクニカルトラック」に登壇し、当該技術の発表を行なう予定。
深度推定とは、二次元の映像や画像を解析し、カメラから物体までの距離を推定する技術。人間の脳は目から見える景色を把握し、物体までの距離を判断できるが、この判断についてディープラーニングを活用して高精度に行なうことが可能になった。深度推定は、自動車の自動運転において人間の目に代わる技術として活用できる他、工場や倉庫における物資の自動運搬、自動掃除機などの家庭用ロボット、車いすなど物体の場所と距離を把握して制御する際に必要な、適応領域の広い技術。
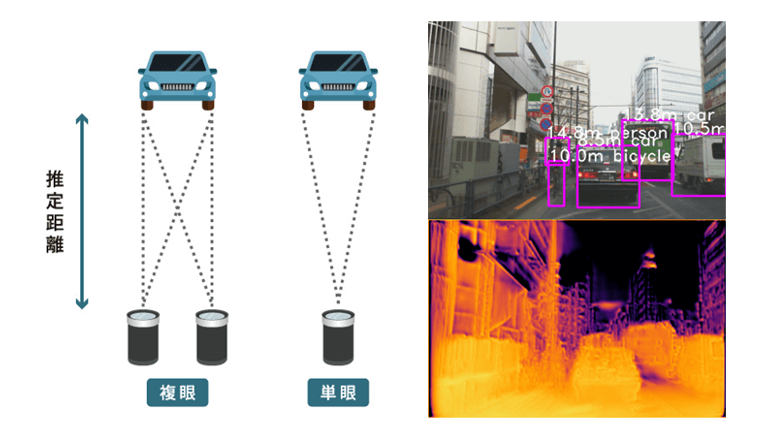
今回ALBERTが発表する深度推定技術では、1つのカメラだけで行なう単眼推定が可能で、汎用的な性能のカメラを用いた場合でも高い推定精度を実現する。企業が深度推定技術を製品に搭載する際、カメラを含めた追加部品のコストは大きな問題になる。単眼かつ安価なカメラだけで高い推定制度を担保できるALBERTの技術は、この点において高い競争力を発揮するという。