
完全自立型であろうと、条件付あるいは高度な自動化型であろうと、自動運転に必須となるのはセンシング技術だ。そして地図、きめ細かく正確でいつでも最新情報をもたらすロードマップが不可欠となる。
きょう、グローバルで革新的な車載テクノロジなどを提供するボッシュと、パイオニアの100%子会社、「MapFan」などの地図サービスのを手掛けるインクリメントPは、車載センサを使った自動運転用高精度地図の分野における協業に合意したと発表。自動運転実現のためには、車両は自車の正確な位置情報を常に把握している必要があるという。ボッシュは、車載カメラおよびレーダーを使用した自車位置推定技術「Bosch Road Signature」の開発に取り組んでいる。
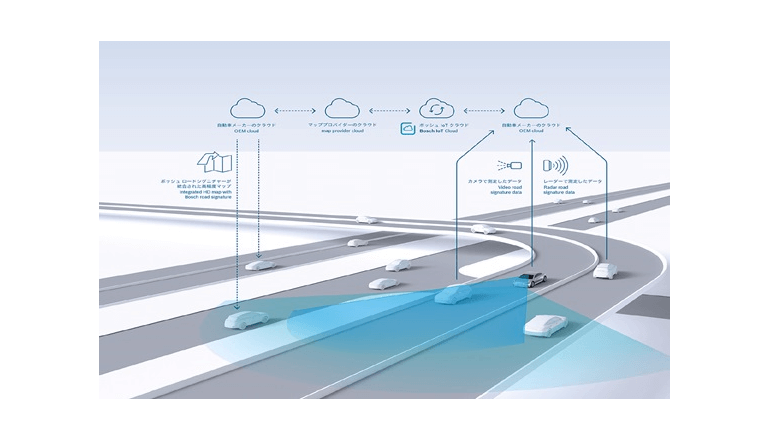
同技術では、車載センサから得られたデータはボッシュのクラウド上で加工され、ローカリゼーションレイヤー(自車位置推定のために使われる地図の構成要素)は常時更新される。そして、ローカリゼーションレイヤーをパートナー企業の作成する高精度地図に統合。自動運転車両は、車載センサ経由で入手した物体に関する情報とローカリゼーションレイヤーから得た関連情報を比較し、自車の位置を推定する。
レーダーを用いた自車位置推定技術、Radar Road Signature の場合、数cm単位の精度で自車位置を把握できるようになる。車載カメラをベースにした自車位置推定と異なり、夜間や雨天時など視界の悪い環境下でも自車位置を認識でき、クラウドに送信するデータ量もカメラベースのマップと比べ抑えることが可能だという。
ボッシュは現在、北米、欧州、中国の主要なマッププロバイダーと提携していて、今回、インクリメントPとの協業では、ボッシュがローカリゼーションレイヤーをインクリメントPに提供し、インクリメントPはこれを高精度マップに取り込んだ日本の自動運転用地図を作成するとのことだ。