
事故を未然に防ぎ、ドライブの快適さや地球環境への優しさをもたらす。先進運転支援システム(ADAS)はいま、さまざまな車両に向けて開発競争が加速している。
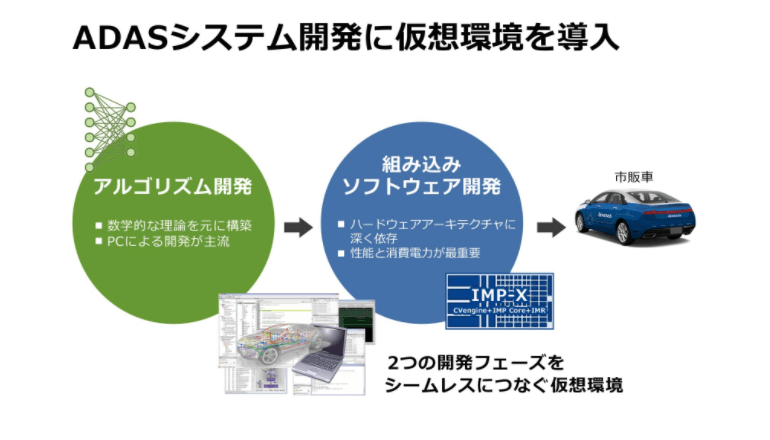
自動運転システムにおいて、たとえば物体検知、認識などのアルゴリズム開発はより複雑かつ大規模なものとなり、PCによる開発が主流となっている。一方、車載ソフトウェアはハードのアーキテクチャを前提とした組込み型で、評価ボードなどによる開発が中心だ。そのため、アルゴリズムを組込みソフトウェアに移植させることが大きな課題となっていて、2つの開発フェーズ間のスムーズな移行、一体化を実現する開発環境が強く求められているという。
ルネサス エレクトロニクスと、Australian Semiconductor Technology Company社ならびに傘下のVLAB Worksは、ルネサスのADAS用SoC「R-Car V3M」をPC上に再現し、組込みソフトウェアをPCのみで開発できる仮想環境「VLAB/IMP-TASimulator」を共同開発。ASTCおよびVLAB Worksが来年初旬から提供を始めると発表した。
「Renesas autonomy™」コンセプトに基づく一連のソリューションのひとつだという。VLAB/IMP-TASimulatorは、R-Car V3M内蔵の画像認識エンジン「IMP-X5」をPC上に再現し、ソフトウェアの開発期間を大幅に削減、ASTC独自の「タイミング相関型シミュレーション」搭載によりハードウェアの処理時間見積もりを高速化――一般的なサイクルベースシミュレータと比較して100倍以上高速といった特長を備えている。
この新たな仮想環境の上で、開発者はハードウェアの動作を隅々まで確認・制御することが可能なため、ソフトウェアの不具合も効率的に検出することができ、品質の高いソフトウェアを従来の半分以下の期間で開発できるとのことだ。