
ロボット/AI
果実を柔らかく確実につかむロボットハンドを開発、慶應義塾大学ら
慶應義塾大学理工学部システムデザイン工学科の野崎貴裕助教は、慶應義塾大学先導研究センター・ハプティクス研究センター、シブヤ精機と共同して、軟弱果実の取り扱いが可能なロボットハンドシステムの開発に成功した。
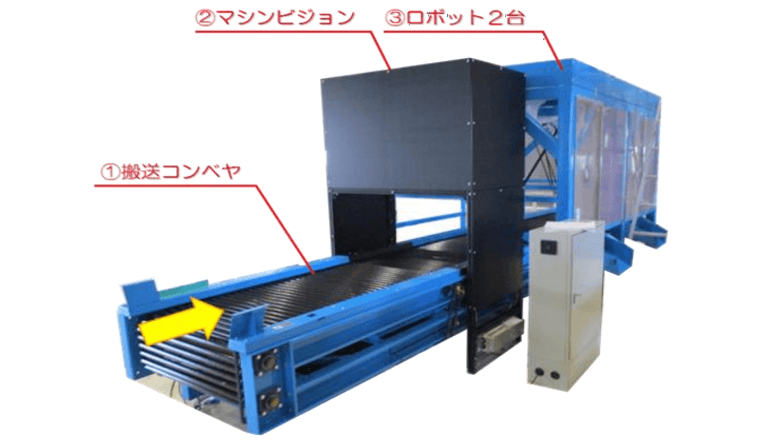
ロボットハンドシステムは紫外照明と白色照明とを合わせた独自のマシンビジョンによって果実の大きさや位置、腐敗度、傷の度合いを測定する。また、高精度力触覚技術(リアルハプティクス技術)を搭載したロボットハンドによって柔軟で確実な把持が可能。これによって、極度に腐敗が進行した軟弱な果実であっても非破壊かつ正確、迅速に果実を取り扱うことができ、衛生的な選果ラインの維持と選果効率・処理能力の向上が図れる。
慶應義塾大学によると、農産物のように軟弱かつ不定型な対象物のハンドリングにリアルハプティクス技術を応用することで、ソフトにつかむことができるロボットを開発できたという。
また、大きさや形状、硬さが不均一な青果物であっても、適切な力加減で柔軟かつ正確な把持やハンドリングが可能。紫外照明と白色照明を活用したマシンビジョンによって、果実の大きさ・位置・腐敗度・傷を測定してロボットハンドと連動して動作する。
研究グループでは、柑橘の腐敗果を除去するだけでなく、イチゴや桃、トマトなどの選果や選別から箱詰めまで一連の作業を自動化・省人化するロボットシステムや、お弁当や総菜の製造ラインへの適応など幅広い応用展開を見据えて研究開発を実施中。さらに、農産物の収穫や調整など、より複雑でソフトな取り扱いが必要な作業への展開も検討している。