
ZMPは、コンピュータ制御可能な研究開発用移動台車プラットフォーム「POWER WHEEL II」の受注を開始した。サンプルプログラムやSDK(開発環境)が付属しており、自動搬送や移動ロボットの研究開発に役立てることが可能。
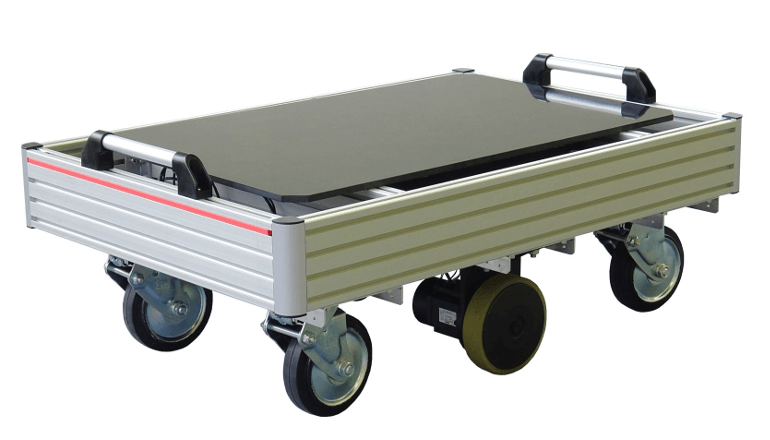
POWER WHEEL IIは、大容量リチウムイオン電池を搭載、高出力モータを用いた独立二輪駆動方式の6輪(中央部駆動輪×2、自在輪×4)台車で8時間の走行が可能。積載スペースは幅650ミリメートル×奥行950ミリメートル、最大積載重量は100キログラムで様々な実験機材の搭載が可能。
標準センサーとして、高精度ロータリエンコーダ、慣性センサー、測距センサーを搭載。オプションとして、レーザーセンサーやステレオカメラ・単眼カメラなどが搭載できる。
また、外部に設置したPC(オプション)から通信機能を用いて遠隔操作の実験も可能。制御用PCとしてLinux PCを搭載、モニタ・キーボード(オプション)を接続してオンボードで開発できる。ソフトウェア開発環境(SDK)として、各種センサー情報の取得、モータ駆動、通信(Wi-Fi)などのライブラリとサンプルプログラムが付属されている。
近年、少子高齢化に伴う労働力人口の減少、電子商取引の拡大による配送の効率化への対応など、物流や製造現場において自動搬送・無人搬送や移動ロボットへのニーズが高まっている。
ZMPでは、コンピュータ制御可能な研究開発用実験車両「RoboCar 1/10」を販売、自律移動や移動ロボットの研究開発分野で活用されている。また、物流分野では作業員に自動で追従する物流支援ロボット「CarriRo(キャリロ)」を販売、物流会社や製造業の工場での実際の運搬作業に用いられている。
販売価格は、300万円(税別)で2017年12月の出荷を予定している。