
Tracking Viewは、日立と日立産業制御ソリューションズ、計測関連事業を手がけるサイトセンシングとが共同で開発したシステム。自律航法にビーコンと地図情報による位置補正を組み合わせることで、屋内における搬送車両や作業員の位置情報を高精度に計測する。自立航法とは、端末に搭載されたセンサーから取得される情報を用いて、自己位置を推定する測位技術のこと。
屋内において誤差約3.0メートル以内という高精度で位置情報を計測するとともに、従来方法に比べて設置するビーコン数が少なく済む。そのため、システム構築の期間や初期・維持管理コストを抑えることが可能。また、屋外ではGPS信号を位置補正に利用することで、屋内外の位置情報をシームレスにつなぐことができる。具体的には、搬送車両や作業者に取り付けた加度や角度、地磁気の3つのセンサーのデータを、動線および加速度、減速度、旋回などに変換する技術によって移動距離や方向などの挙動を演算する。
日立は事業化の第一弾として、日立キャピタルオートリースが協業し、フォークリフトのリース事業と組み合わせて2017年10月に提供開始する。
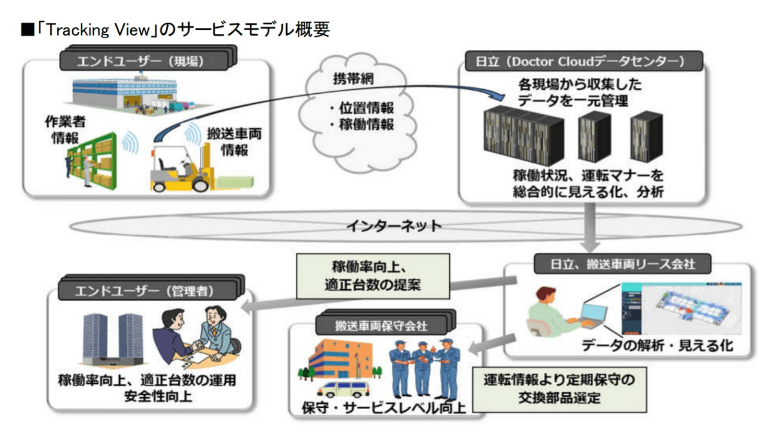
日立キャピタルオートリースのユーザー(リース先)で運用されているフォークリフトに搭載したセンサーから収集した稼働情報や屋内外の位置情報などのデータを、日立の「Doctor Cloud」で分析し、可視化する。日立キャピタルオートリースは、その情報を基にフォークリフトの最適な配置や適正保有台数を算出する他、資材の配置など現場レイアウトの最適化をユーザーに提案する。
これにより、フォークリフトの稼働率を高め、車両の燃料費や保守費、人件費などのコスト削減に貢献します。また、車両のスピード超過や急加、急減、急旋回などの情報を安全運転指導や路面レイアウトの改善に活用することで、現場の安全性向上を図る。
日立は今後、Tracking Viewを水処理・交通などの社会インフラ事業者や流通分野などにおける作業者の動線管理の適用にも拡大していく方針。