
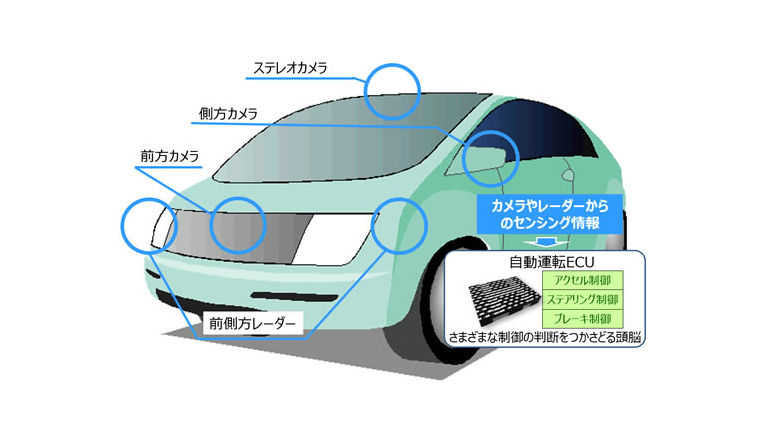
完全自動運転の時代がやってくる。いまでも路面や側前方をカメラやレーダーなどで認知し、障害物等があれば、自動で回避したりブレーキを作動させたりする技術が実用化されている。
それらセンサ情報により走行を制御するアプリケーションプログラムが日々磨かれている。
来る時代のクルマ、いまの自動車のさらなる高度化に向けて、車両周辺を360度センシングし、車線変更や追い越しなども自動で行うアプリの開発が進んでいるという。日立製作所と日立オートモティブシステムズは、自動運転用アプリの開発過程で発生した不具合を短時間に再現する技術を開発。センサ情報のみを記録・再現する従来手法に比べ、開発過程で生じたアプリの不具合全体の再現時間を約40%に短縮できることを確認した。
これまでは不具合発見の際、車内ネットワークに流れるセンサ情報を蓄えた外部記録装置の中から、該当情報を、記録されたタイミングで自動運転ECU(電子制御ユニット)に入力して、不具合を再現し、原因を究明――。数10ミリ秒周期で実行されるアプリの不具合を確実に再現するためには、アプリ実行とセンサ情報入力のタイミングを一致させる必要がある。が、実行のみECU内部で行われるため、同期は困難であった。
そこで両社は、自動運転車向けアプリ開発を効率化するリアルタイムデータベースを活用し、アプリ実行とセンサ情報入力のタイミングを高精度に記録して再現する技術を開発。従来方式で最大数10ミリ秒だった再現タイミング誤差を、同技術を用いることで約10マイクロ秒に抑えることを可能にした。
自動運転の高度化に伴いセンサ情報が膨大化していく将来にも、不具合の原因究明を効率的に進められ、自動運転用アプリの高品質化とテスト工数の削減に寄与するという。同技術を搭載した自動運転ECUとソフトウェア開発キットを、日立オートモティブシステムズは今年11月より提供予定とのことだ。