
そこで配管内を走行するロボットが開発されてきた。脚型もしくは車輪型ではアプローチできない環境で検査点検ができる、ヘビ型ロボットに期待が寄せられている。が、従来のそれは、曲管などを含む複雑配管内で操作するのは困難であった。オペレータはその先頭に搭載されたカメラからの映像をもとに遠隔操作する、ロボットの状況を十分に把握できないために。垂直配管を滑り落ち、ロボットの位置が不明になるなど、課題が多かったという。
革新的研究開発推進プログラム(ImPACT)タフ・ロボティクス・チャレンジ(PM:東北大学 大学院情報科学研究科 田所 諭教授)における研究開発課題「タフな索状ロボットおよび極限ヒューマンインタフェースのための極限制御システムの開発」(責任者:京都大学 大学院工学研究科 松野 文俊教授)において、松野 文俊教授、早稲田大学 理工学術院創造理工学研究科 奥乃 博教授、岡山大学 大学院自然科学研究科 亀川 哲志講師、金沢大学 理工研究域機械工学系 鈴木 陽介助教らは、プラント設備配管内の日常点検や緊急時点検を目的としたヘビ型ロボットを開発し、複雑な配管内を走破し、配管内の状況を正確に提供することに成功した。
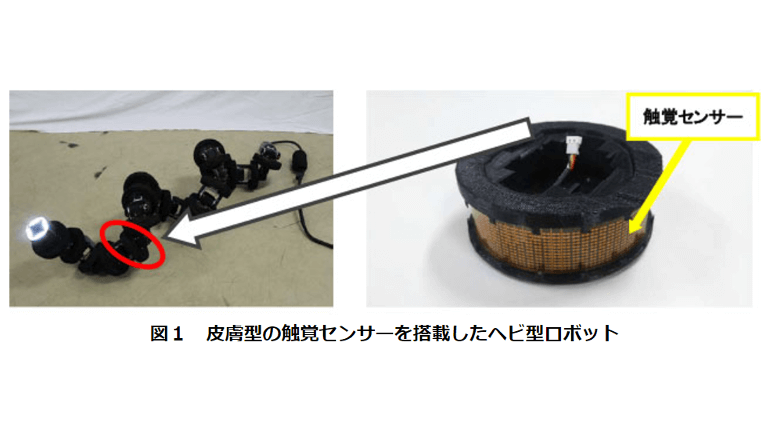
ロボット表面に巻き付けて装着できる皮膚型の触覚センサ――全周圧力センサを新たに開発。20個の関節を持ち、各関節のモータを駆動させることでさまざまな移動方式を実現するロボットのリンクにそれを搭載した。これにより、オペレータは直接見ずとも配管内の状況を把握し、曲螺旋捻転運動もできるようにしたヘビ型ロボットは、操作が非常に困難であった曲管部も走破可能となった。
音響センサによる配管内距離情報、慣性センサ(物体の運動を司る3軸の角度と加速度を検出する慣性計測装置)からの進行方向情報、多関節モデルによる姿勢推定情報を組み合わせて、精度良くロボットの位置を推定し、同時に配管のマップを作成できる統合型SLAMを開発。ヘビの尻尾部分に付けたそれと、管の入り口に設置したスピーカとの仕組みにより、その精度は、水平管・垂直管・曲管を含む長さ6mの200Aの配管で距離推定誤差7%以内、配管地図精度は体積率で68%以上を達成したという。
そして、先端カメラによる画像、全周圧力センサの接触情報、統合型SLAMとの統合による収集情報の可視化を行う点検用情報表示を高度化したことにより、配管内点検時にロボットの状態や管内部の様子を確認しながら遠隔操縦することが可能になり、オペレータの負担軽減を達成。配管全体の状況把握、点検箇所の記録と確認が可能になり、収集情報の記録と利活用が容易になったとのことだ。