
現在、内閣府総合科学技術・イノベーション会議では、革新的研究開発推進プログラム(ImPACT)を主導している。ImPACTは、実現すれば産業や社会の在り方に大きな変革をもたらす革新的な科学技術イノベーションの創出を目指し、ハイリスク・ハイインパクトな挑戦的研究開発を推進することを目的として創設されたプログラムだ。その一環のプロジェクトである「ImPACTタフ・ロボティクス・チャレンジ」では、その研究課題として「災害対応建設ロボットの開発」を掲げて開発を進めている。
同プロジェクトでは、極限の災害現場でも仕事ができる遠隔自律ロボットの実現を目指し、屋外ロボットのカギとなる基盤技術を競争的環境下で研究・開発を実施。それにより、未来の高度な屋外ロボットサービス事業開拓への礎を築いていくことを目的にしている。今回、二重旋回機構を用いた複腕の災害対応重作業ロボット(建設ロボット)のプロトタイプを開発したことを発表した。
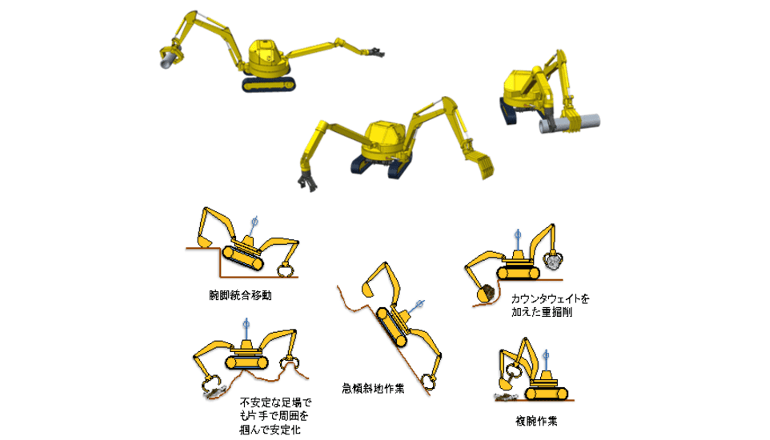
これまでの遠隔建設機械は、「器用さの不足」「重作業が不可能」「斜面や段差での移動に限界がある」「遠隔操作が困難で作業効率が低い」という課題を抱えていた。こうした課題を解決するために、ImPACTタフ・ロボティクス・チャレンジでは、二重旋回・複腕機構と高出力油圧ハンドを採用した。
開発ロボットに適用した二重旋回・複腕機構は、左右の腕と肩の旋回部を同軸上に重ねている。肩の関節が別々の軸上に配される機構に比べて、大きな直径のベアリングを肩の旋回部に使うことができ、これにより重作業を器用に行え、急傾斜地・段差の移動に性能を発揮できるという。また、建設ロボット用の4本指ハンドを開発して片方の腕に装着。形状を変更することで、ショベルのような「掘削」とハンドの「把持」のモードを切り替えられる。さらに、遠隔で操縦するオペレータが、まるで対象物を触っているかのような力覚と触覚を感じながら、精密で確実な作業ができる機能を搭載している。
同プロジェクトでは、大阪大学や東北大学、東京工業大学、東京大学、神戸大学、科学技術振興機構(JST)などが研究チームとなり各種技術を研究・開発。今後の改良や要素技術との統合、限界性能試験によって数年後の現場適用、実用化を目指す。