
製造・保守・物流現場などで自動化が急進している。現在、ロボットに一層複雑な作業をさせるために、対象物の位置や向きなどの状態推定、状態ごとの動作計画などを専門家が設計・開発し、それらを機械学習(ML)させている。
ロボット制御用ML手法の一つ「強化学習」は、カメラ画像から自律的に操作を学べる、複雑な作業を自動化できると期待されているが、作業精度を上げる際、AIがロボットを実稼働しオンラインで試行錯誤して学習していくため、安全上の懸念が生じる。一方、「オフライン強化学習」では、精度アップに数千以上の予習データを必要とし、データの作成に数週間~1カ月以上かかる、課題があったという。
東芝は、オフライン強化学習において世界初だという、少量画像データから複雑なロボット操作を高精度に制御するAI技術を開発した。公開ベンチマーク環境(RLBench)でピッキングや物を置くなど8種の作業のシミュレーション評価をし、従来手法で36%だった平均成功率が72%に向上し、世界最高精度(同社調べ)を達成した。同AIは100程度の学習データで精度を上げられるため、わずか半日ほどで学習データを作成できるようになる。
学習データの作成に必要なデータが少ない分野や試行錯誤してデータを作成することが難しい分野で、導入時の負荷を抑えながら、より簡単に機器制御ができるようになり、安全性が求められる製造機器や医療機器の操作・自動運転を含む、あらゆる分野における自動化を推進し、人手不足の解消に貢献できる。
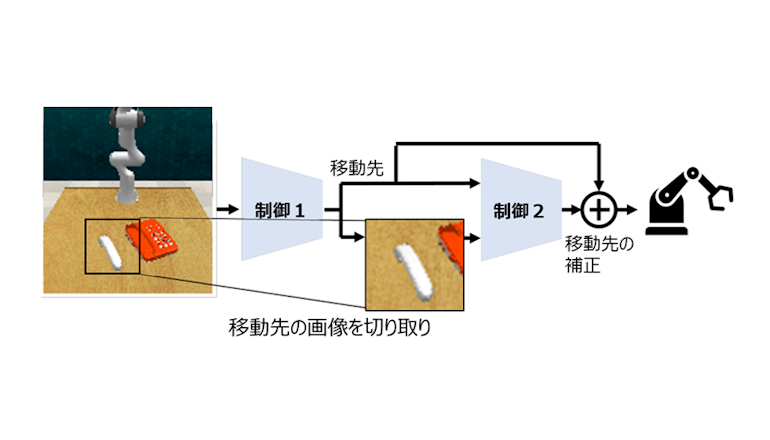
ロボットアームの作業状況の撮像から注目領域を切り出して制御の微調整を行う、2段階制御を学習する技術を開発し、精度の大幅な改善を実現した。杉山将氏との共創成果である同技術の有効性を実環境のデータを用いて進め、精度のさらなる向上を図り、早期の実用化を目指すという。同社は上記技術の詳細を国際学会「ICRA」にて14日に発表する。