
自動運転時代が迫っている。あらゆるモノが高度に協調し、安全かつ効率な移動を提供するモビリティ社会の実現が期待されている。究極に高度化されたICT(情報通信技術)がもたらす同社会のコンセプトとして、「シグナルフリーモビリティ」を示しているという。
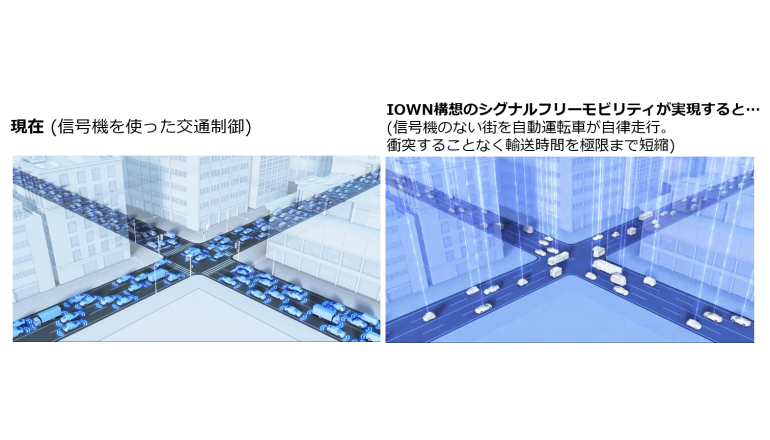
信号機のない街を自動運転車群が相互通信しつつ走行し、衝突することなく輸送時間を短縮する未来の姿に向けて、NTTは、全体最適制御のための技術を確立した。渋滞を引き起こす現在の交通制御に対して、IOWNにより実現するシグナルフリーモビリティでは、車群から収集したデータをデジタルツインでリアルタイムに解析し、車同士が衝突せず移動時間を短縮する交通全体の最適状態(各車の速度や位置)を予測して交通を制御する。
デジタルツインの状態予測系のモデル化、データ駆動型でそのモデル学習する方式を確立することがテーマである。研究では、10-20台の自動運転ミニカー各車(ノード)とそのつながり(エッジ)で構成されるグラフを用いて、上記モデル化を行った。時々刻々変化する複雑な交通制御を単純な部品(各車の状態予測/制御と近接車間の通信)の組み合わせで表現することがその狙いである。
学習後の交通制御モデルを用いて予測/制御フェーズを実施するシステムを構築。位置計測用ビーコン、計算用GPU、Wi-Fiモジュール、左右独立制御型モーターを搭載した各車がサーバや他車と通信し、衝突せずに全体の輸送時間を短縮する状態をデジタルツインで予測――10-20台をリアルタイム(0.1-0.2秒ごと)に制御できた。現実世界で衝突することなく、スムーズに走行している様子を実験的に確認した。
今後、交通制御実験の規模を拡大し、より実世界の交通に近い状況の実証実験を展開していくことで、IOWNの実現を推進していくという。同社は今回の成果を「オープンハウス2022」の講演や展示で紹介する予定だ。