
昨年公表された「官民ITS構想・ロードマップ」によると、日本では今年から自動運転パイロットの市場化が始まり、人手不足が深刻化する物流分野においては、高速道路での後続車無人隊列走行を実現する技術の商用化が進められていく。
工程表が官邸資料(PDF)の末尾にある。自動運転を具現化するシステムのソフトウェアは複雑化、かつ大規模化していて、開発コストと時間の削減が求められている。近年、所要機能を早期に実装し、試作と評価を迅速に反復して製品化するため、オープンソースの自動運転基本ソフトウェアAutowareの導入が広がっている。
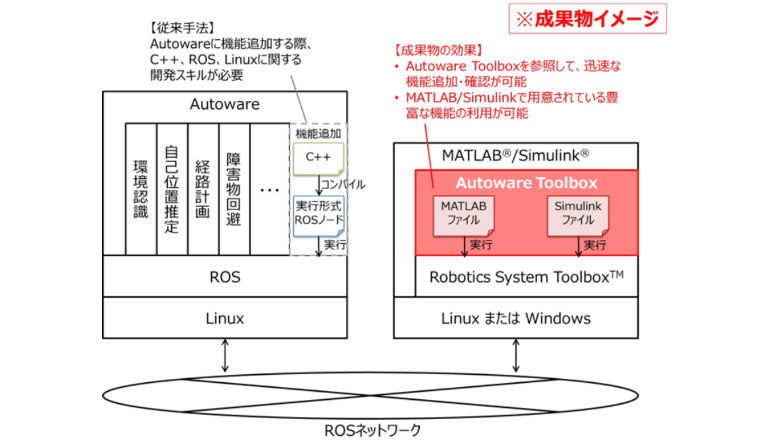
Linux環境で動作する同ソフトウェアは、各機能がロボットオペレーティングシステム(ROS)ノードとして実装されている。C++言語のプログラミングで新機能を実装できるが、それらに不慣れな開発エンジニアはその習得自体に時間を要していたという。ネクスティエレクトロニクスと埼玉大学は、AutowareとMathWorksのMATLAB/Simulinkを連携させるROSノードのサンプルを作成、サンプル数を増やしてGithubに公開した。
MATLAB/Simulinkのオプション製品ロボティクスシステムツールボックスが提供するROSノードとのインターフェースを用いたという。上記サンプルにより、LinuxやC++に不慣れな開発者の工数削減が可能になる。オープンソースであるため企業や大学などとの協働が容易になり、多様な技術やアイデアを結合できる。自動運転システム開発におけるエコシステムを形成し、新たなサービスや製品開発につながると期待される。
ROSノードサンプルをさらに増やし、ドキュメントの充実を図っていくという。両者の研究は、JSTさきがけの「大容量データをリアルタイム処理するメニーコア向けソフトウェアプラットフォームの構築」の成果(参考文献例)を活用しているとのことだ。