
老朽化した橋梁や大規模構造物の点検は重要課題であり、特に人による作業が難しい場所でのロボットアームの応用は喫緊の課題だ。人間の手の代わりに、つかむ・放す・運ぶなどの作業をする機械の腕であるロボットアームは、産業用、医療用、研究・教育用、宇宙船の船外作業用などに実用化されている。
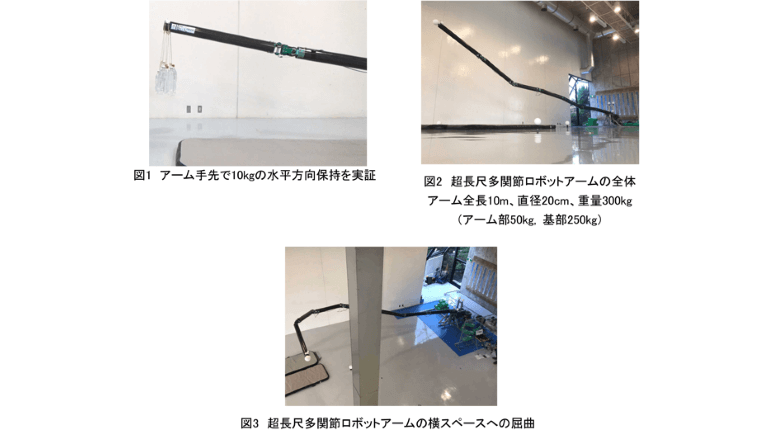
新エネルギー・産業技術総合開発機構(NEDO)と東京工業大学は、狭い場所に進入できる細くて長いロボットの開発に取り組み、世界最長となる全長10mの超長尺多関節ロボットアームを2018年9月に開発。今回、アーム手先で10kgの物体を水平方向に保持できることを実証した。
両者が開発したのは、アーム全長10m、直径20cm、重量300kgで、可動域は最大高さ10m、水平8mの世界最長の超長尺多関節ロボットアームだ。細長い形状で多くの関節を持つことから、障害物の回避、狭い場所への進入や探査が可能だ。
テコの原理が働くため、長いロボットアームが重量物を保持することは容易ではない。そこで今回、複数の化学繊維ロープを関節の滑車に巻きかけ、荷重を分散して支えることでこれを実現した。
今回、10kgの重量物の保持を実証できたことで、橋梁・トンネルなどの大規模構造物のインフラ点検作業における目視・打音検査の自動化などへの応用が期待できるという。今後は、水平方向の保持だけでなく、重量物の持ち上げや運搬の実現に向けた技術開発を進めていく。
また、2019年度に日本原子力研究開発機構の楢葉遠隔技術開発センター(福島県)で、廃炉調査への利用可能性を検討する予定であることを公表している。