
大規模な自然災害、橋梁や隧道などインフラの老朽化、産業施設における事故が発生している。近年、世界各地では、災害・事故時に限らず平時でも使用でき、点検および迅速な事態収拾を可能とする特殊環境用ロボットの配備が急務となっている。
防災・減災、災害対応、インフラの保守管理などに資するそれは、日本国内でも技術開発が盛んになっている。けれども、特殊環境で活用するための性能のものさしが不明である。ロボット技術開発の促進および普及のために、性能評価基準などの策定が喫緊の課題であるという。NEDOは、「ロボット・ドローンが活躍する省エネルギー社会の実現プロジェクト」にて、多彩な分野における各種ロボットの性能を導入前に評価する日本初の取り組みとなる、試験方法および計測システムなどをまとめた性能評価基準の開発を行っている。
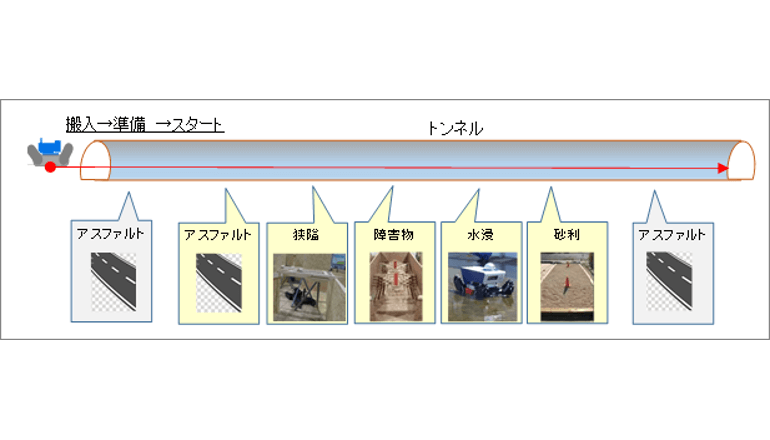
そしてきょう、トンネルやプラントの災害といった危険な現場でも状況を確認できる、遠隔操縦型陸上移動ロボットの性能評価基準策定に向け、三菱重工業とともにその試験方法を確立する実験を行ったと発表した。災害現場を想定して三菱重工内に水溜りや障害物、暗闇、ガス発生源などの特殊環境を模擬的に再現し、ロボットの走行距離や時間、各種搭載センサの収集情報など、同基準策定に向けた試験方法の妥当性を検証した。
長岡技術科学大学構内では、三次元狭部障害ジャングルジム等を構築し、災害発生時およびプラントでの日常的な点検時でも活用可能なロボットの走破性を評価――試験方法の検証用データを取得する試験も実施した。結果、トンネルやプラントなどで災害が発生した際の陸上ロボ活用に向けた性能評価に必須の各種データと、プラントでの日常点検時における活用に向けた性能評価用の基礎データも取得できたという。
NEDOは、先に締結した協定の一環として、「福島ロボットテストフィールド」の設計用に、今回得られた知見を県へ提供する。