
ロボットが後方宙返りしたり、ペットになったりして、自家用車は自動で障害物を避けたりブレーキを掛けたり、貨物トラックだって日本の高速道路を自動で隊列走行しようとしている。今日この頃、これらの技術はめざましい進歩を遂げ、完全自動運転の時代まであと一歩――
そんな自動運転車や自律型ロボットには周囲の状況や己の状態などを認知し、判断し、障害物を回避するしくみ等を適切に操作する機能が必須だ。認知機能の前段ではレーダーやカメラが、人の眼のような役割を果たす。視覚情報のほかにも、GPSからの位置情報がラリーのコ・ドライバーみたいな役割をするし、平衡を感知する三半規管のような機構からの情報もある。それらを総合判断し、物体を回避するしくみ等を操作し――を繰り返すのは、人間の場合「脳」であり、自動運転車やロボットの場合は「コンピュータ」だ。
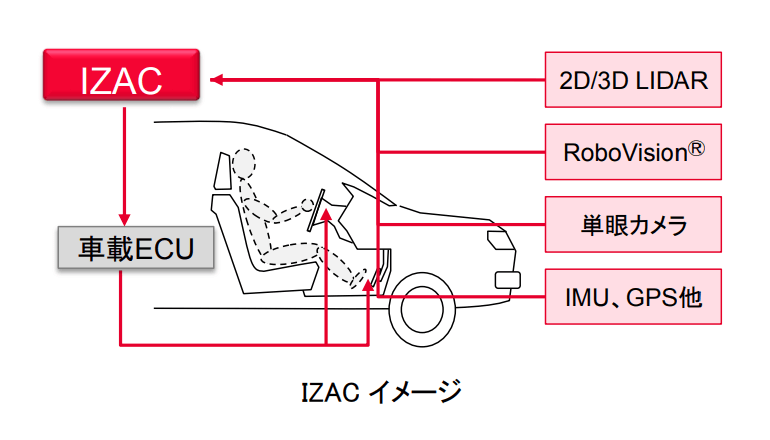
それについて、すでに自動運転車「RoboCar®」や宅配ロボット「CarriRo®」の実証実験を公道などで行っているZMPはきょう、自社開発の自動運転用コンピュータIZAC(アイザック)において、汎用開発ツールである画像認識機能ソフトウェアライブラリのOpenCV、3次元点群処理のためのポイントクラウドライブラリ(PCL)への対応を開始したことを発表した。
IZACは、自動運転に必要となる認知・判断・操作の機能をライブラリ化し効率的に開発を進められるハードウェアとソフトウェアの統合システム。インテル高性能プロセッサをメインCPUに使用し、リアルタイムおよび非リアルタイムなタスクをワンボックスで制御可能であり、フレームワークにOROCOS(Open Robot Control Software)を採用している。今回のOpen CV・PCL対応により、オープンソースでの開発・検証の加速や効率化、顧客の開発アルゴリズム・ソフトウェア資産の活用が期待できるという。