
あらゆるモノがネットにつながる「IoT」時代に突入した今、先端技術による人手不足の解消や生産性の向上への期待が高まっている。状況下で進化したロボットの活用は必然である。
無線網でつながり遠隔制御されるロボットは、単体での作業から、マスゲームのように複数が協調して作業することが求められている。しかし従来、通信遅延によってロボットからのデータや制御コマンドが適時到達しないため、正確な協調制御が実現できていなかったという。NECと日本電産はきょう、小型コンピュータを内蔵したインテリジェントモータ®を遠隔からリアルタイムかつ高精度に協調制御する技術を共同開発したと発表した。
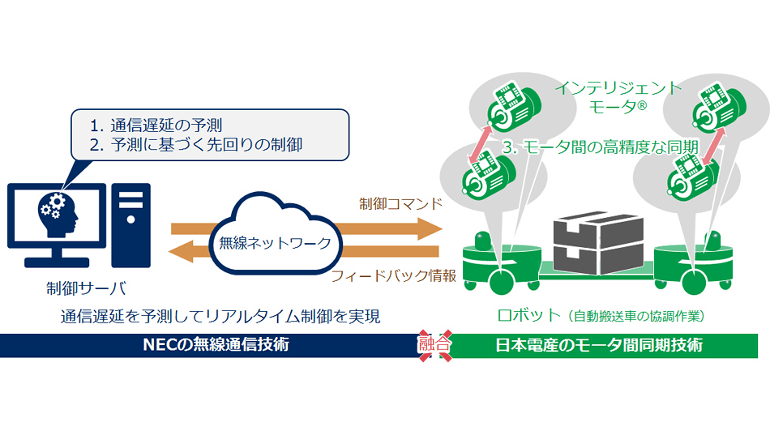
新技術は、Wi-FiやLTEなどの無線ネットワークにおいて「制御サーバとインテリジェントモータ®間の通信遅延を予測」、モータの位置・速度・トルク等のフィードバックデータをもとに制御コマンドを適時送出する「通信遅延予測に基づく先回り制御で遠隔からリアルタイム制御を実現」、高価な制御用コンピュータを不要にしたマイコン内蔵型で密な会話ができる「モータ間の高精度な同期によるロボットの協調制御」を実現した。
上記特長を備えたしくみにより、例えば工場や倉庫の搬送業務においては、高コストの大型自動搬送車ではなく、低コストの小型自動搬送車を複数台組み合わせ協調させることで様々な形状・重量の荷物を搬送可能になり、オペレーションの低コスト化に繋がる。実際、周辺機器からの通信やノイズの影響で無線が不安定である環境下で、工場や倉庫での自動搬送車を想定した実験を行い、搬送効率を従来比で30%改善できることを検証したとのことだ。
同技術を両社は今後、警備ロボット、災害時の調査ロボット、検査や宅配のためのドローンの遠隔制御などでも応用、製品化を進めていく構えであり、NECは今回の成果を来年早々ラスベガスにて開催の「ICCE 2018」で発表する。