
国際会議などでも話題になる「第4次産業革命」。そのモチーフとしてあらゆるモノがネットにつながる「IoT」と、人工知能(AI)がよく取り上げられる。産業用ロボットはすでに製造現場でたくさん活躍しているせいだろうか、「革命メンバー」としての扱いが比較的少ない。
しかし近年、生産ライン自動化ニーズの多様化により、ロボットに求められる作業レベルが高度化している。たとえば、バラ積み部品のピッキング――。従来システムでは、対象物ごとに多様な把持動作を教示する必要があり、これがユーザーにとって大きな負担。把持を確実にするために、対象物に合わせたロボットアーム先端器具(グリッパ)の専用設計・用意が必須であり、システム導入障壁の一つになっていたという。
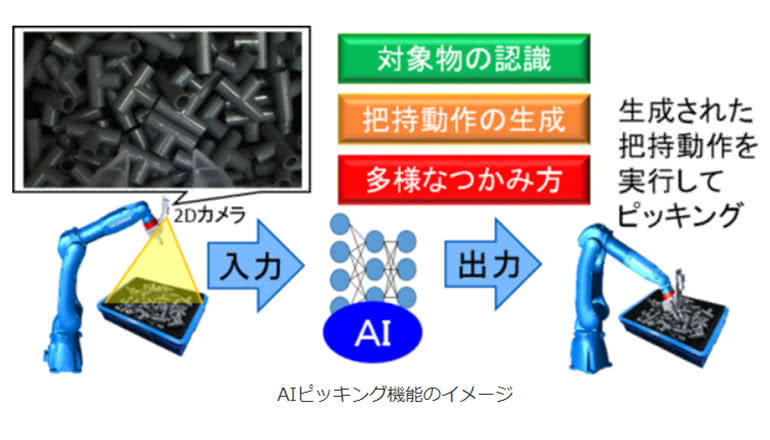
安川電機は、製造業向けAIソリューションで実績を持つクロスコンパス社と共同で、ロボットによる対象物の認識・把持動作の生成・多様なつかみ方を自ら学習するAIピッキング機能を開発した。長期経営計画「2025年ビジョン」に沿って新たに始動させた、産業自動化のソリューションコンセプト「i³-Mechatronics」を具現化したものである。
新機能では、コントローラに入力されるアーム先端からのカメラ画像情報をもとに、AIの深層学習(ディープラーニング)によってロボット自身がリアルタイムに動作を学習・生成する。ために教示が要らなくなる。把持動作中も最適な把持位置を解析しつつピッキングするので、対象物の形状や把持位置・方向に合わせたグリッパの設計が不要。モノの学習によって単一グリッパでも多彩な物品をピッキング可能になる。効率的なシステム構築も実現できる。
「2017国際ロボット展」でも披露する新機能について、同社は部品配膳/仕分けシステムへの適用を見込んでいて、今後より多くの対象物や環境での実証を蓄積し、把持率の向上や対象物の拡大などに取り組んでいくという。