
情報通信
建機オペレータの熟練ノウハウを再現、土砂の積み込み作業を自動化
建設現場で働く機械はさまざまにある。中でも代表的な重機の一つ、油圧ショベルが操縦席に向いていて、掘削した土砂をオペレータが自分の方に引き寄せつつ、すくったそれをダンプトラックに積み込む建機を「バックホウ」という。
建設業では技能労働者の高齢化、若手就業者の減少による労働力不足が深刻な課題となっている。省人化による生産性の向上が急務となっている。施工の自動化、とりわけベテランの技を再現するしくみの開発には大きな期待が寄せられている。たとえばバックホウのそれは、地盤の造成やトンネル掘削といった土木工事や大規模建築物の地下掘削などにおいて、膨大な作業量となる土砂の積み込みを助ける。
土砂の積み込み作業は、バックホウのアームやブーム、バケットを巧みに操る熟練技能が必要なため、これまで自律化が困難だったという。大林組、NEC、大裕の3社は、それぞれが保有する技術とノウハウを活用し、ともに汎用建機を自動操縦型にして生産性を飛躍的に向上させる取り組みの第一弾として、「バックホウ自律運転システム」(動画:YouTube)を共同開発したことを今月18日に発表した。
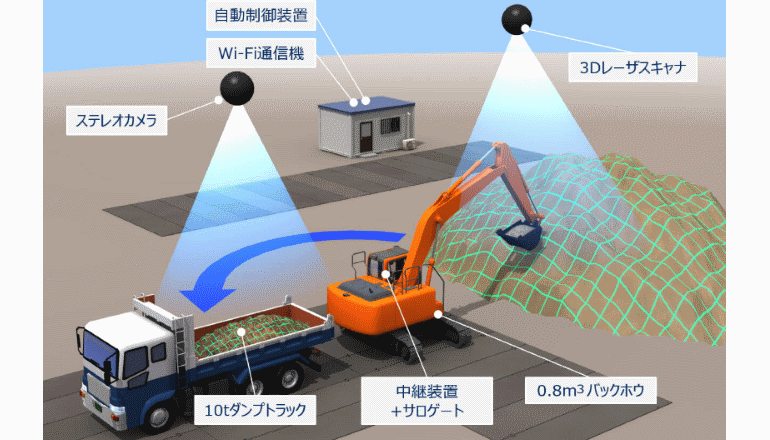
バックホウに大林組と大裕が共同で開発した汎用遠隔操縦装置「サロゲート」を装着したうえで、対象土砂やダンプトラックの状況に応じた動作計画を大林組のノウハウをもとに作成し、刻々と変動するバックホウの動特性や応答遅延による影響を加味した制御を行うために、NECの「適応予測制御技術」を適用。熟練技能者の操縦ノウハウをAIに学習させたことで、掘削や積み込み時の機械の動き方を高精度に再現できる。
作業員の接近を検知する「クアトロアイズ」などにより安全も担保し、バックホウのメーカーや機種を選ばず後付けで容易に自律化が可能。大幅な省人化を、センサーネットワークの統合制御とともに実現する。今回のシステムは12月に大林組の土木工事現場で稼働予定とのことだ。