
人手に頼ることが多く、人不足の影響をもろに受ける食品産業では、自動化に対する関心が特に高まっている。
FOOMAで積極的にロボット活用を提案
先日、盛況のうち閉幕したFOOMA JAPAN2017(国際食品機械工業展)では、専用の食品機械のほか、ロボットメーカーを中心に汎用ロボットを活用したさまざまなアプリケーションのデモが行われた。
安川電機は、ばんじゅう詰めに対応したロボットシステムと、ゴロゴロと移動して生産ラインに合わせて組み替えられるトッピングロボットシステムを出展。超繊細な把持力を持つグリッパで、食品を丁寧にピッキングしての整列や箱詰めなどをアピールしていた。
ファナックは、パラレルリンクロボットを使い、コンベアにを流れるワッフルを、画像センサによるトラッキングで2個ずつ高速に並べるデモを展示。凸凹表面のあるワッフルでも確実に取り出せる吸着ハンドをアピールした。また飲料工場向けに、コンベア上の倒れたボトルを除去して再度投入するといった知能化したデモも実施。
川崎重工業は、双腕スカラロボット「duAro」を食品工場の衛生環境向けに対応させたものを展示。協働ロボットのユニバーサルロボットも、人と並んで作業でき、用途の変化に応じて再プログラムで対応できる柔軟性などを提案し、多くの人の注目を集めた。
ロボットで変わる衛生管理。新たな課題も
食品製造業でロボットへの関心が高まり、さまざまなアプリケーションが出てくる一方で、新たな課題も。
ひとつは衛生管理。ロボットという産業機械を使うことにより、従来とは異なる経路からの異物混入への対策や衛生管理が必要となる。
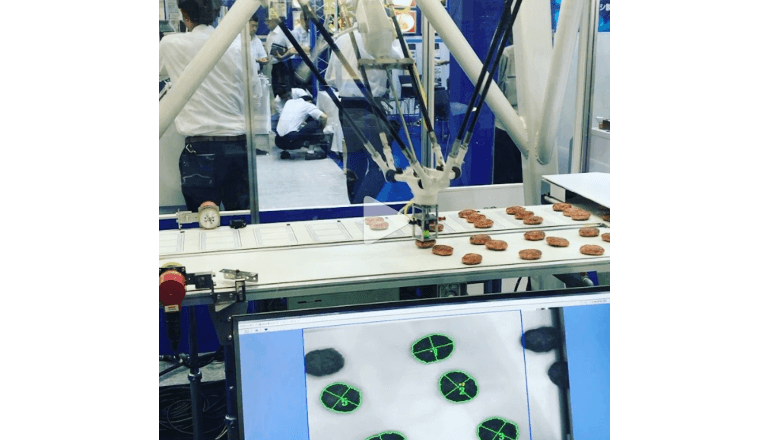
例えばある食品機械メーカーは、パラレルリンクロボットとエアーによる吸着で冷凍ハンバーグをピッキングするデモを実施。
ハンバーグと接するエアーチャックの接触部が薄い膜状となっており、それがハンバーグ表面の凹凸に倣うことで真空の効果を上げるというもの。表面に凹凸のある食品もピックングできるのが特長だが、その反面、エアーを吸った時に油や食品カスがエアー配管まで入ってきたり、エアーチャックの膜が何度も使うことによって破れて食品に混じる可能性も。また食品の上部をロボットが動くことになり、機械油も跳ねて下に落ちていく。
担当者はこれらに対し、配管の定期的な清掃や部品の点検、食品機械専用油の使用や油はねのカバーを設けることによって防ぐことはできると説明していたが、導入するユーザー側はそれを想定した日々の運用が発生する。
また、現在は包装された食品や食品加工品に対してロボットの利用が進んでいるが、今後生鮮品をロボットで取り扱うようになると、そこには従来とは違った難しさが横たわっている。
食品のなかでも加工食品は色や形、成分にばらつきが少ない。焼成されていたり、冷凍されていたりするので、ある程度の硬さもある。加工食品は、形状や寸法で一定で、硬い材質の工業製品に近似しており、ロボットハンドで把持しやすい。しかし、肉類や魚類などの生鮮品の場合、個体差が大きく、それ自身が柔らかく、ハンドでは掴みにくいという難しさがある。またハンドリングして容器に収めたりする場合も姿勢が安定せず、これまで以上に微妙な制御が必要になったりする。
ある食品機械メーカーの設計担当者は「これが肉や魚などの畜産物や海産物特有の課題。個体差といっても、大きさや形だけでなく、水分量や肉の柔らかさ、脆さなども違ってくる。画像だけでは判別できず、水分量など、これまでとは違った視点でセンシングするといったことも必要になるかもしれない」と課題を挙げている。